 Ultimate Robotics
Ultimate RoboticsThe next step in uMyo development is combining data from multiple sensors. And since a significant part of our goal is using uMyo in prosthetics control - this demo shows how it can work.
In a sense it's a remake of our effort from 2019 based on uECG sensors in EMG role, but seriously upgraded - both in reliability and in simplicity of replication. Now it works basically out of the box - only thresholds need adjustment for a particular person. This particular demo took about 8 hours in total - that includes coding, adjusting and making the video (we used the same robotic arm as in 2019 - making one from scratch of course would take much longer).
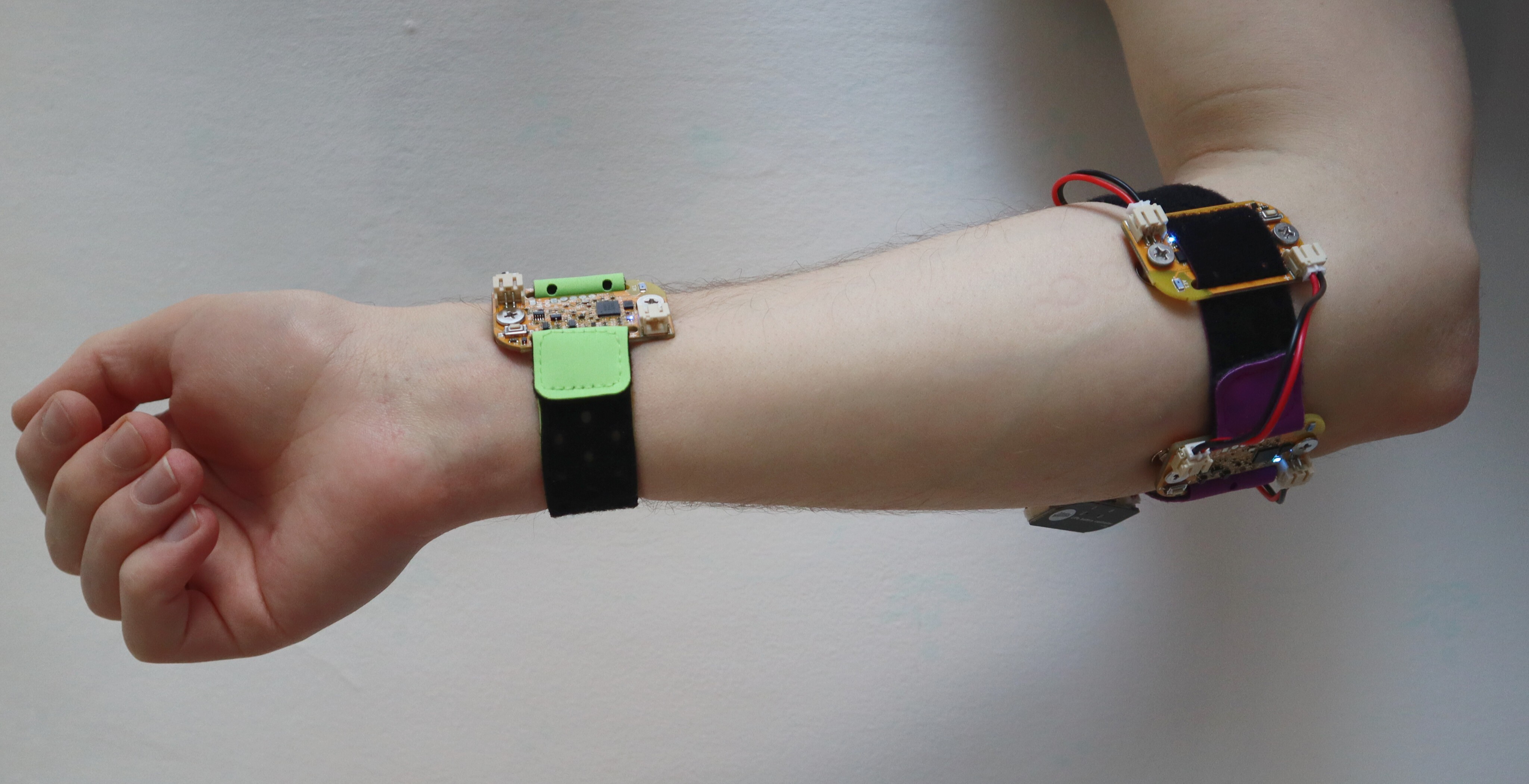
Three uMyo units are used here: two next to the elbow, placed over muscles controlling 3rd, 4th and 5th fingers (one unit is monitoring 3rd finger, another monitoring 4th and 5th without differentiating between the two). The third uMyo is placed on a wrist to pick up thumb motion. That part is good for demo only - in case of amputation, prosthetic's thumb must be controlled with some other muscle. We tested several variants on the arm - even attached thumb control to a triceps - but none are both reliable and illustrative at the same time, so we stuck with the wrist placement for a demo.
Signal processing is intentionally very simple - only thresholding, scaling and averaging - with the goal to make it easy to understand and adjust. For practical applications much better results can be obtained with machine learning - which we'll show in further work.
Control quality is quite good - the only noticeable problem here is cross-sensitivity between 3rd and 4th fingers, not huge but it takes some effort to apply just enough force to trigger one finger motion without triggering another. Response time is very good - basically limited only with servo speed, servo motion starts immediately when the effort is applied.
We believe with some ML and possibly more sensors involved, this can be applied in practice without significant additional work on the hardware.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.