 Jacob David C Cunningham
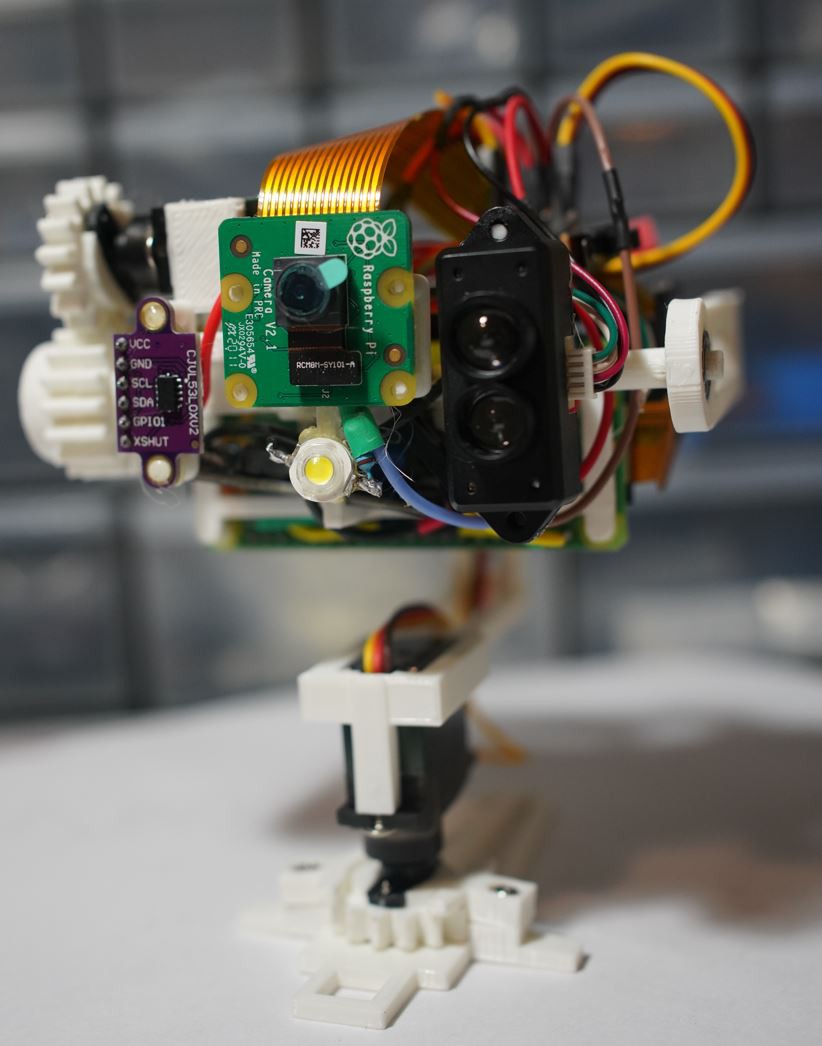
Jacob David C CunninghamI got the body finally assembled. After reprinting the wish bone deal... and also the stand.
I need to learn how to take pictures... I want to set aperture but the coloration is bad.
I cleaned it up though.
Went from all that to this.
Ahh... anyway I gotta build the tail dragger robot tomorrow.
I've been enjoying this little Chromebook though I got it for $50
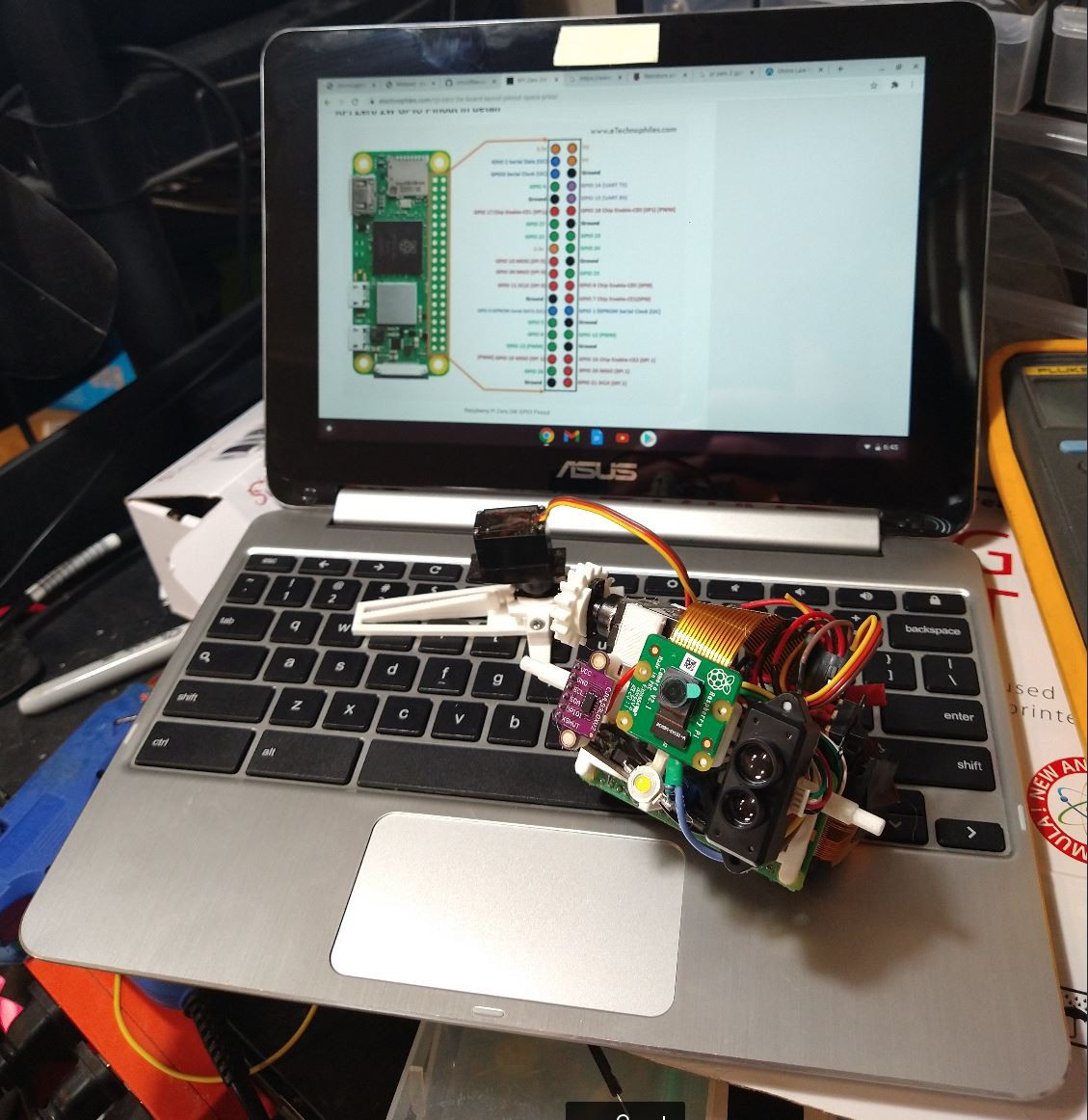
Oh yeah, the issue with i2c is I only tested it on bus 1 not 0. So when I plugged the MPU6050 into 0, it was not working well. 1 seemed more reliable so I moved it over there. But the MPU is still not reliable... it will work like 20% of the time.... to fully dump the info from it. So idk, I will need to work on that, otherwise the NED feedback loop to keep it upright won't work or at least I need to run it once every so often to level it with the horizon.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.