 Jacob David C Cunningham
Jacob David C Cunningham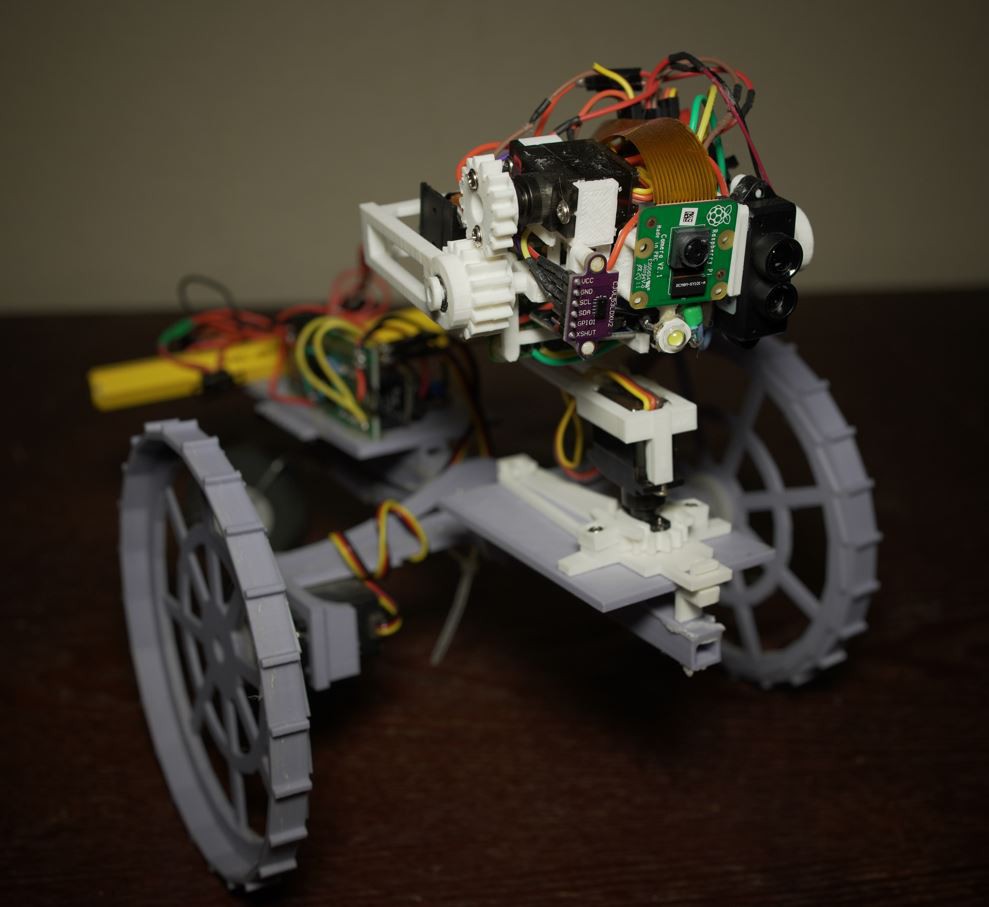
Today I made this manual web control, it's building towards the web interface that would monitor the telemetry/decision making by the autonomous part.
It was a good experience to do this because it exposed some problems like bad code and also how tiny the FOV is from the camera potentially... which means multiple images and probing before being able to make a decision where to go.
It's also nice being able to see where the Lidar beam is on the image since you see this purple pattern.
I also realized how bad of a design this thing is (top heavy) and the servos stop too abruptly causing vibration.
I did print mounts so the head can be attached to the robot securely-ish (some slop).
Without the chisel (yellow bar) in the back it is very tipsy.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.