 Fabio Vezzari
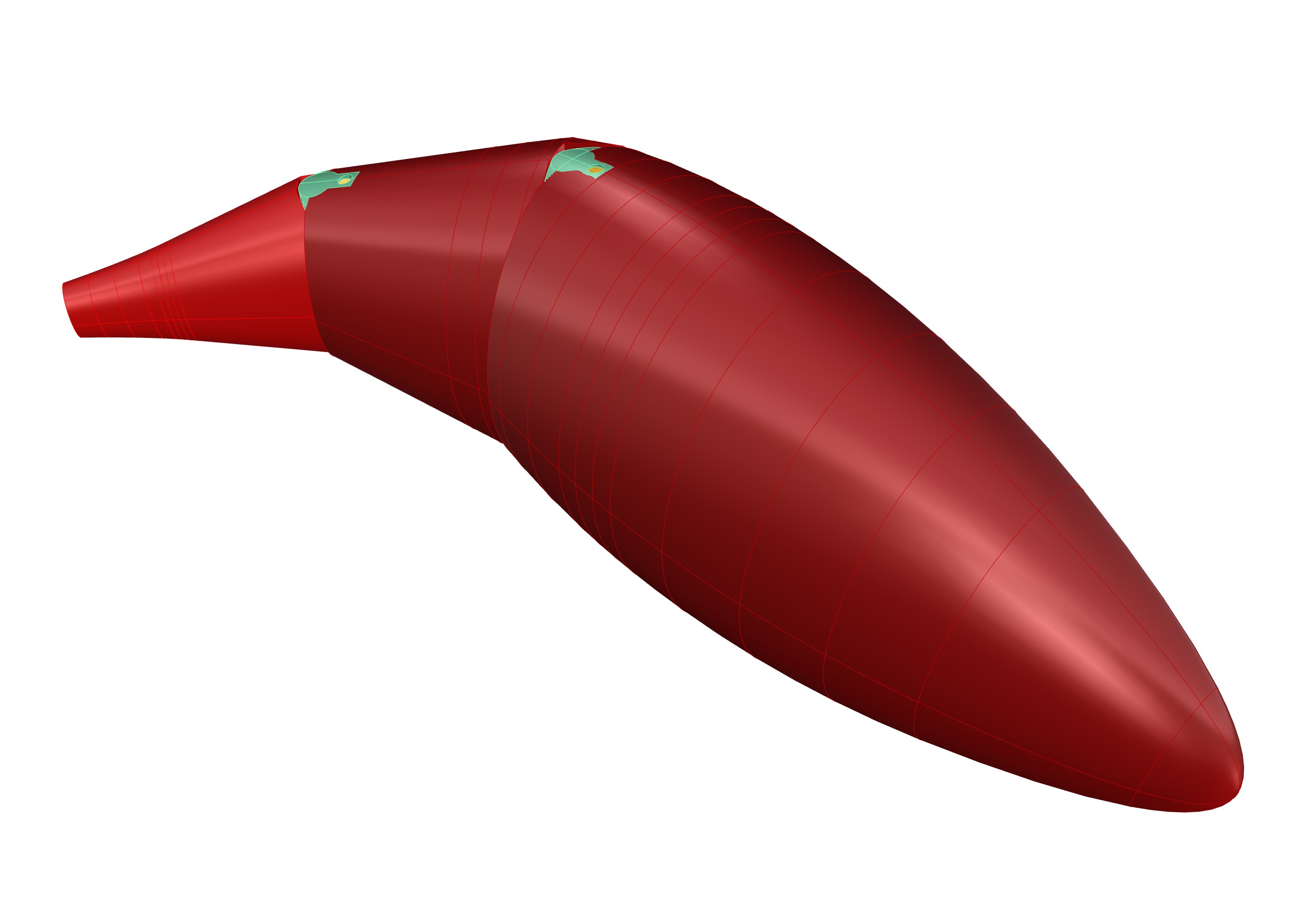
Fabio VezzariStudying steals me time from doing a full in depth showcase of the current progress, but so far I have designed the hull and bearing parts to allow Nereid to flex, discretely (pun intended). In fact, this robot will be divided in 4 parts to describe a waving/flapping motion: head, first half of the tail, second half and fin. This requires the parts to rotate around the z axis and to not block each other, so I worked on this and on the bearings to make this rotations possible under a certain loads.
Here a screen shot of the external result so far.
A big decision that made this 3d design possible is the use of 3d printed PETG and other assembling pieces made of special plastics. This will allow me to implement a big variety of complex surfaces that this bio-mimetic robot needs, meanwhile other sturdier plastic components will help me run from the problem of rust. However, plastic is a choise that I have to carefully ponder, because seaworthiness needs to go hand in hand with biocompatibility.
Selecting the right materials will be crucial, but it won't be hard. Plastic components can be very reliable and durable and I have easily found affordable components on several websites, some for offshore and others for medical use. An interesting intersection of markets.
What's next?
I managed to make a rough estimate of the tail loads in order to consider a simple kinematic mechanism and a trasmission system. Those are going to be the next groups of components to be implemented on the cad.
This project will probably become a long one, so I will be thinking on how to give it a better purpose...maybe I will organize a crowdfunding to build Nereid and later opensourcing the entire project. But let's see what happens with each mile of swimming through this adventure.
See you on the next update!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.