Tuesday 16:06, 29/11/2022 - I'm still procrastinating...
So, I was reading and re-reading a lot of scientific articles I had on my PC (I have gigabytes of scientific articles about a myriad of subjects, mostly focused on artificial muscles), and I remembered some interesting things I saw.
Method 1: No moving parts active valve with variable viscosity liquid (AVVVL).
That's quite a mouthful, but let me explain:
There is a type of variable suspension/shock absorber that uses a liquid that can have its viscosity changed by passing an electromagnetic field through it.
So you can progressively and instantaneously change the flow of the fluid without the need of expensive and complex gradual valves.
In the video the guy simply use a metal powder mixed on some liquid and then moves a permanent magnet on it, with that, the liquid achieves such amount of viscosity that no liquid is capable of escaping the syringe.
(Video is automatically on the time mark I'm talking about: 4:59)
So, with this simple trick even MYSELF can make a simple solenoid valve system with no moving parts that works instantaneously at home using of-the-shelf parts online or on my local stores.
How cool is that?! :D
One could use those cheap electromagnets or homemade coils (and electromagnets) around the tubes as solenoid, and they are so small you could put on every single muscle instead of relying on those heavy solenoid valves that can overheat over time.

The few problems I can think of are figuring out the amount of pressure these electromagnetic valves would be able to hold, and also that these would need to be constantly active to avoid every muscle to be instantly filled; not to mention the risk of increasing the temperature on the ferromagnetic particles within the liquid.
But even then, you could have four or five solenoid valves (ugh, I know, solenoid valves imma right?) that are normally closed that would direc fluidt to each limb, so the electromagnetic ones would only need to be active once the power is directed to them.
But of course, it is not a perfect solution or anything like that, you still have the problem of the "solenoid creep", after all, you will need 2 or 3 of those for every muscle.
The only difference is that you don't need a huge backpack full of solenoid valves, and you could use electromagnetic coils that are way smaller than the microsolenoid valves you can find; Valves that may or may not be able to withstand the pressures you're dealing with.
Method 2: No moving parts hydraulic pump.
I remembered I once saw a hydraulic pump with no moving parts, and I found it.
The fun part of it is that it completely destroys the solenoid valve "tyranny", you can literally put a valve in the muscle itself, you don't need an active valve because the pump on itself is the valve and the pump.
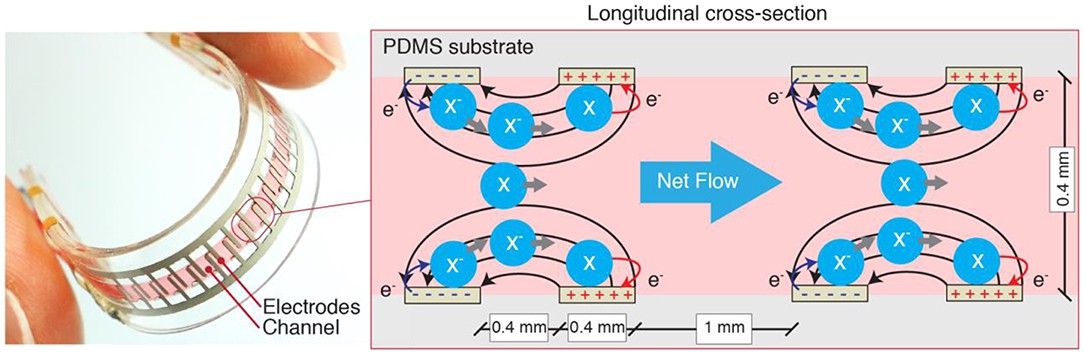
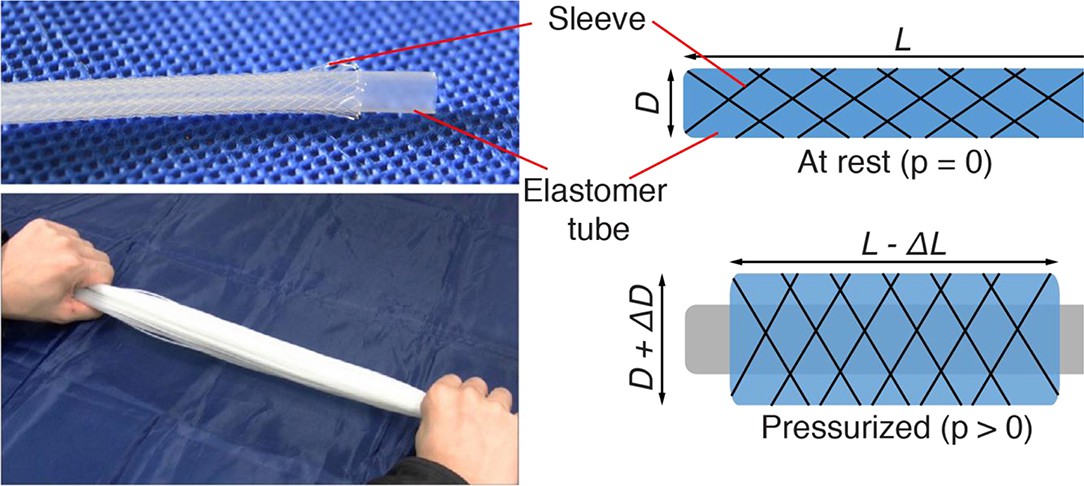
In this website and in this paper a malleable pump with no moving parts is shown powering some soft actuators (aka artificial muscles), they use more or less the same principle used in the dielectric elastomers:
Thousands of volts with a minuscule amount of amps, so it is super safe, because Volts times amperes is equal to wattage (this uses less energy than a cellphone).
A quote from the paper itself:
The relatively high voltage required to drive the EHD soft pumps (5–8 kV) might raise concerns about safety and size of the power supply. These concerns have been addressed in a previous work on Stretchable Pumps where the authors demonstrate untethered operation using a palm sized battery-driven power supply weighting 18 g. Each of these portable power supplies is limited to a current output of 100 μA, widely below the human safety threshold (1–10 mA) but large enough to power up to 6 Stretchable Pumps at the same time. Nonetheless, some applications would benefit from reducing the driving voltage. Strategies to reduce the voltage include reducing the electrodes spacing and searching for combinations of electrodes and liquid materials showing higher EHD performance at lower fields.
Accordingly to a google converter, 100 micro amperes is equal to 0.0001 amps (or "1e-4"). So, 8kV times 0.0001 amps is 0.8 watts.
The problem is that as shown in the supplementary video in the paper itself, it is accelerated by 8 times. And since the video takes more or less 3 seconds to fill the single filament muscle, I can assume it takes 24 seconds to fill a single "fiber".
I wonder how you could increase the speed of actuation, maybe multiplying the amount of pumps? Increasing the voltage?
The pump seems to be extremely simple to make, but I still can't figure out how to actually make one. The biggest limitation is always that I'm not an engineer and I don't have the money to pay an engineer to design these types of things.
The muscle is the same one from that paper about multifilament artificial muscle, by the way.
Method 3: piezoelectric pump.
There are micropumps or pumps that have no moving parts that use piezoelectric buzzers to move elastic membranes in a system, maybe there are commercially available ones, but this means they can be really cheap and easy to make, maybe you could have one for every muscle.
And the interesting part is that these could also be used to pump air (I hope), because there are piezoelectric air pump for aquariums.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.