 Ford Sleeman
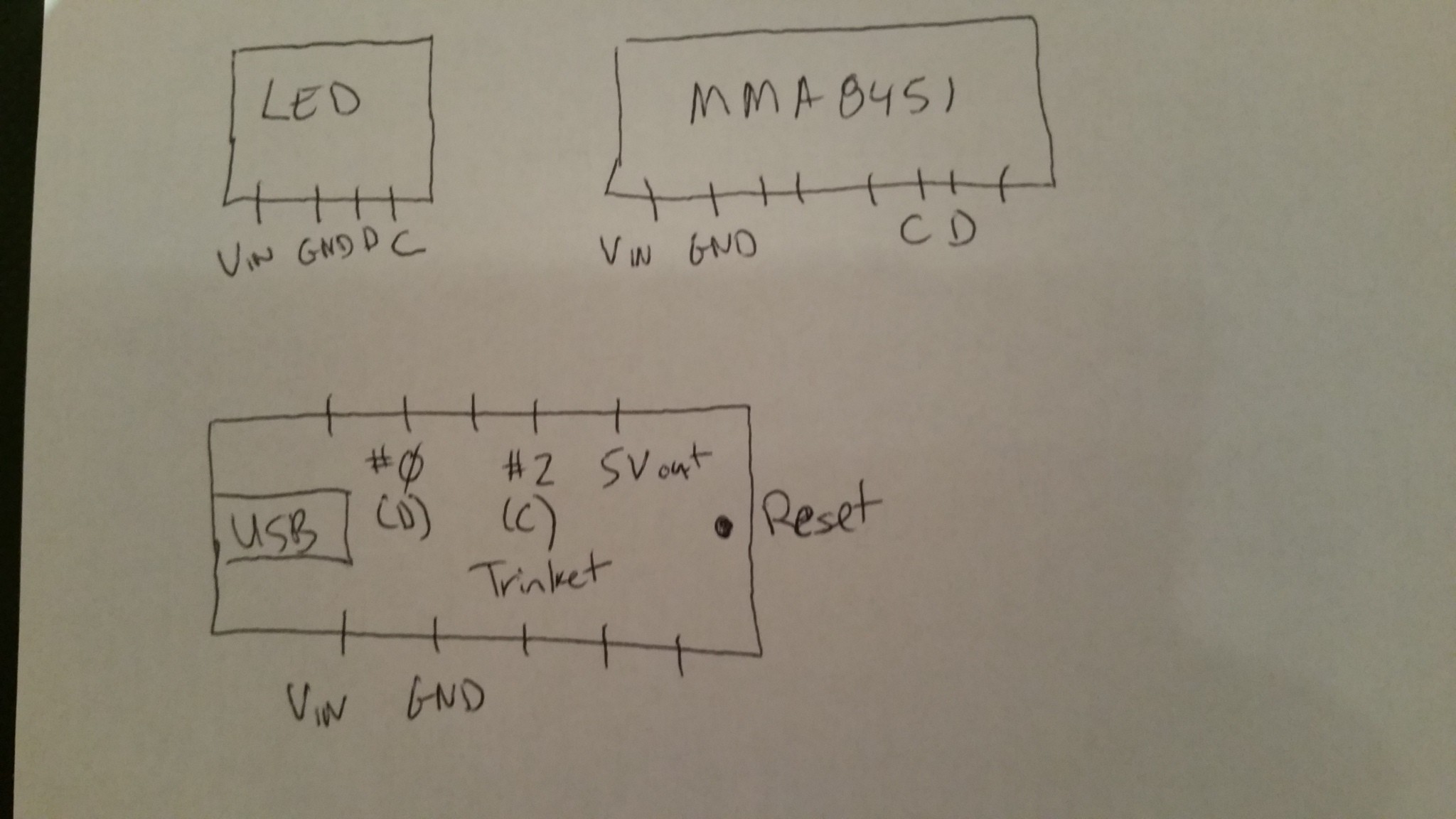
Ford SleemanThis project was for creating a dice that using an accelerometer would randomly generate numbers. The electronics were based on an Adafruit Trinket microcontroller, Adafruit 8x8 LED matrix, and an Adafruit MMA8451 Accelerometer breakout board. The programing was done with the Arduino IDE as the Trinket was comparable with that system.
To make the 1k limit, I needed to disable some interrupt code in the core Arduino code. This process was documented in the project log and software build instructions.
This dice works by using the face orientation of the accelerometer to detect rotations and trigger a new number generation event. I created a loop and checked for orientation changes for a set number of iterations. If the change threshold was met, the dice number was updated. To get a quasi-random number I created a temporary value and for each loop for the orientation check I added the loop number and the orientation enum value. This will be quasi-random because the dice roll will determine when the threshold is met and it would be hard to discern when this would happen. Its not perfect but uses very little memory and gives a pretty reasonable series of numbers.
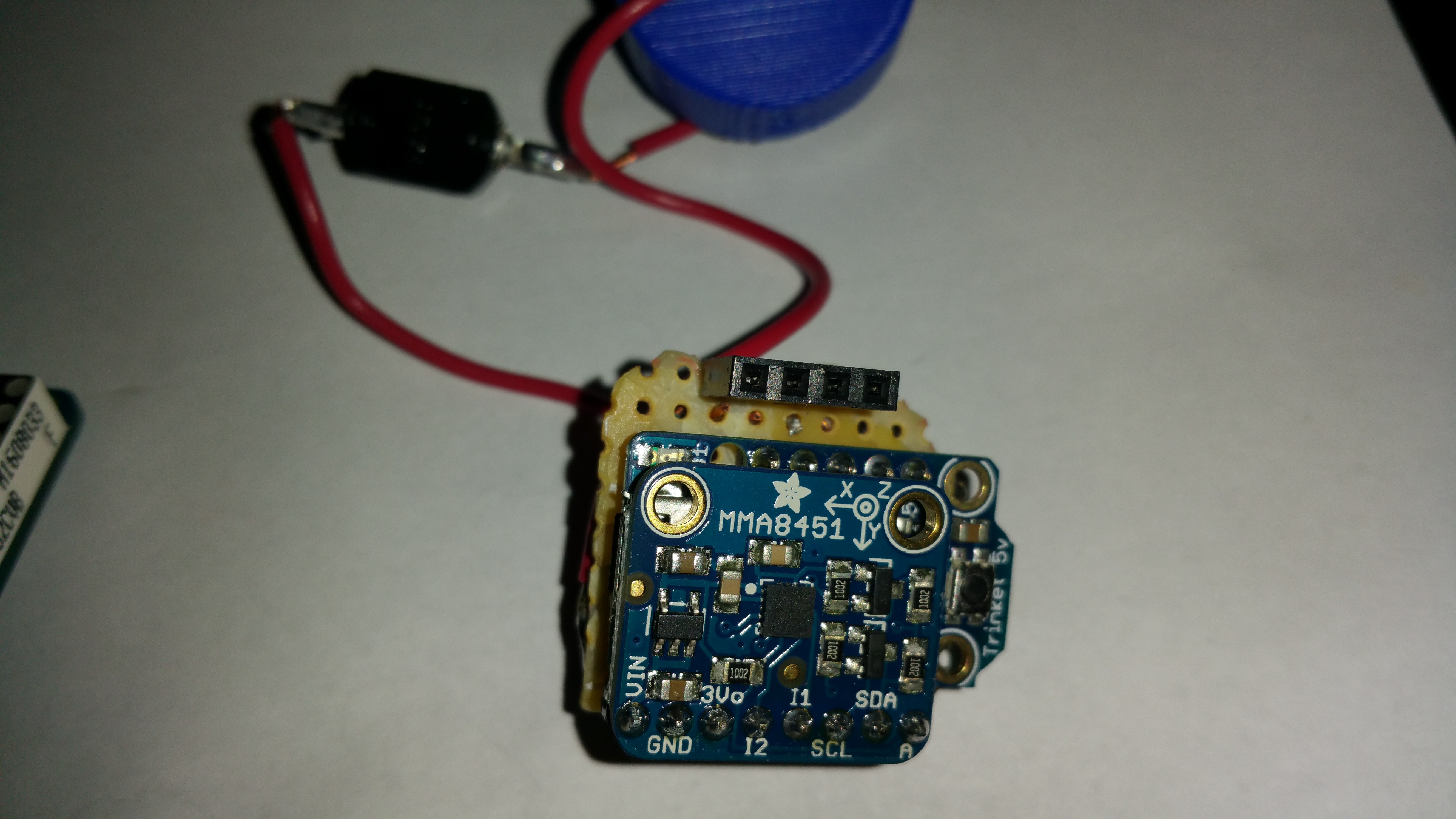
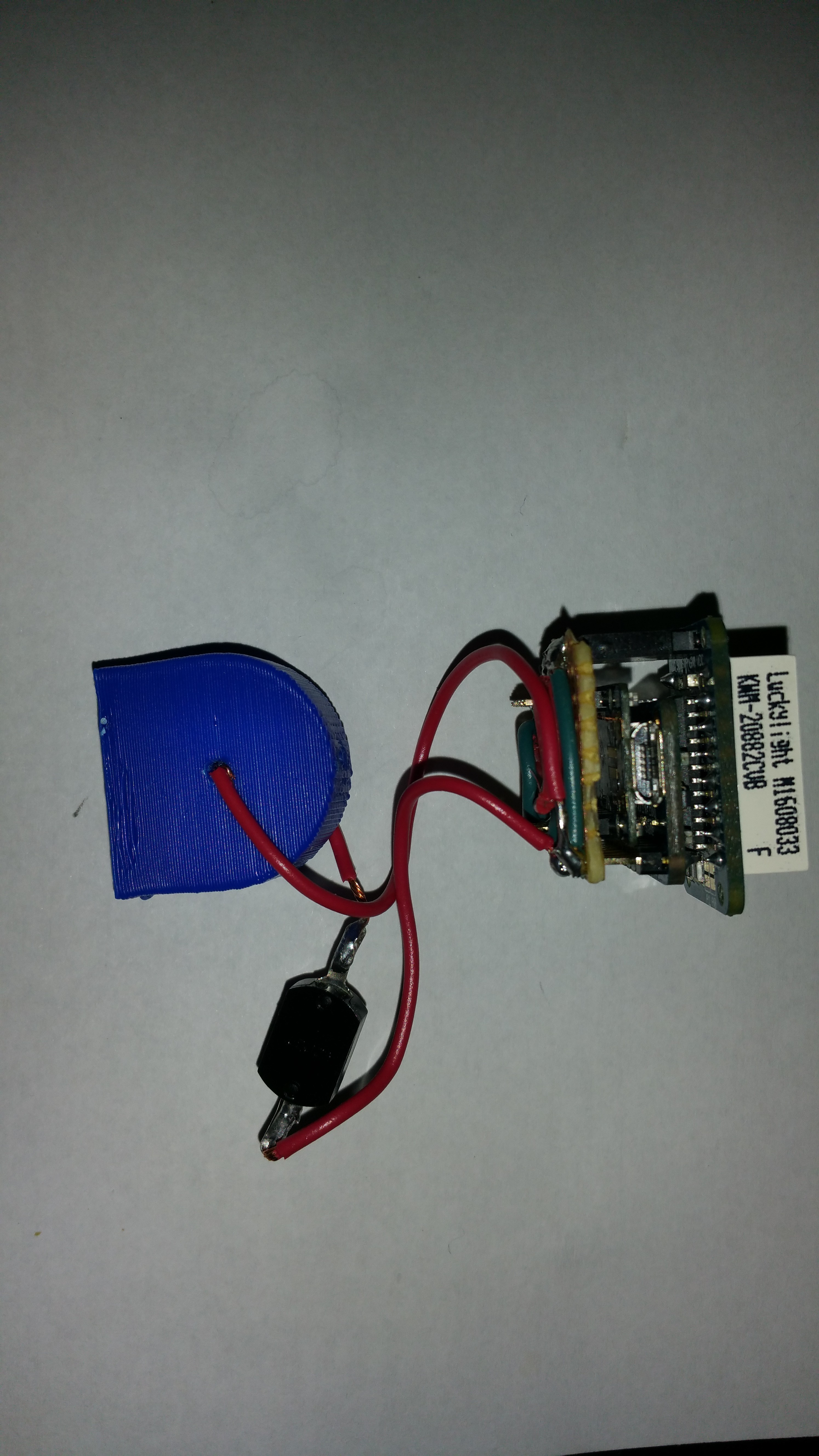
The dice is powered with two CR2025 batteries and has an on/off button. There is still a lot of the free space on device so a lot more features could be added. There is space on the matrix for at least two digit numbers and another button could be added to change the max number being generated.
Here is a video of the dice in operation:
https://drive.google.com/open?id=0B-pKTjS6J01NaHBHc2tzUFY1dmcCode is posted at https://github.com/fsleeman/accel-dice.



 ZaidPirwani
ZaidPirwani
 Ed Danis
Ed Danis
 Mark VandeWettering
Mark VandeWettering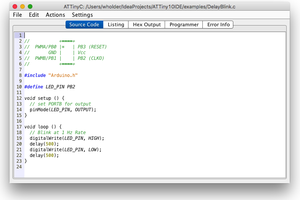
 Wayne Holder
Wayne Holder
The number update is generated by counting the number of orientation changes in a fix number of loops (i.e. a cheap timer). Because how this was tuned tapping the dice or shaking it usually will not trigger a new number generation. The number of loops and the required number of orientation changes during the loops tunes when the display is to be updated. You could chance those if you want a slightly different behavor.