 Neil Lambeth
Neil LambethI originally wanted to board to be the same size as a Pi Zero. This was possible using the basic ESP32 module, but it was lacking a USB port which meant you needed a separate programmer to upload code. I had some of the ESP32 Devkits in my parts box so I set about designing a board using one of these. These boards are quite a bit bigger than the ESP32 modules so this design would have to be bigger than a Pi Zero. I though about designing a slightly bigger board with a different mounting hole pattern but I then decided against this as I wanted these boards to be drop in replacements for the RPi's that we already use in our robots. The next size board I looked at was the Pi A+, this was a pretty good fit for the ESP32 Devkit.
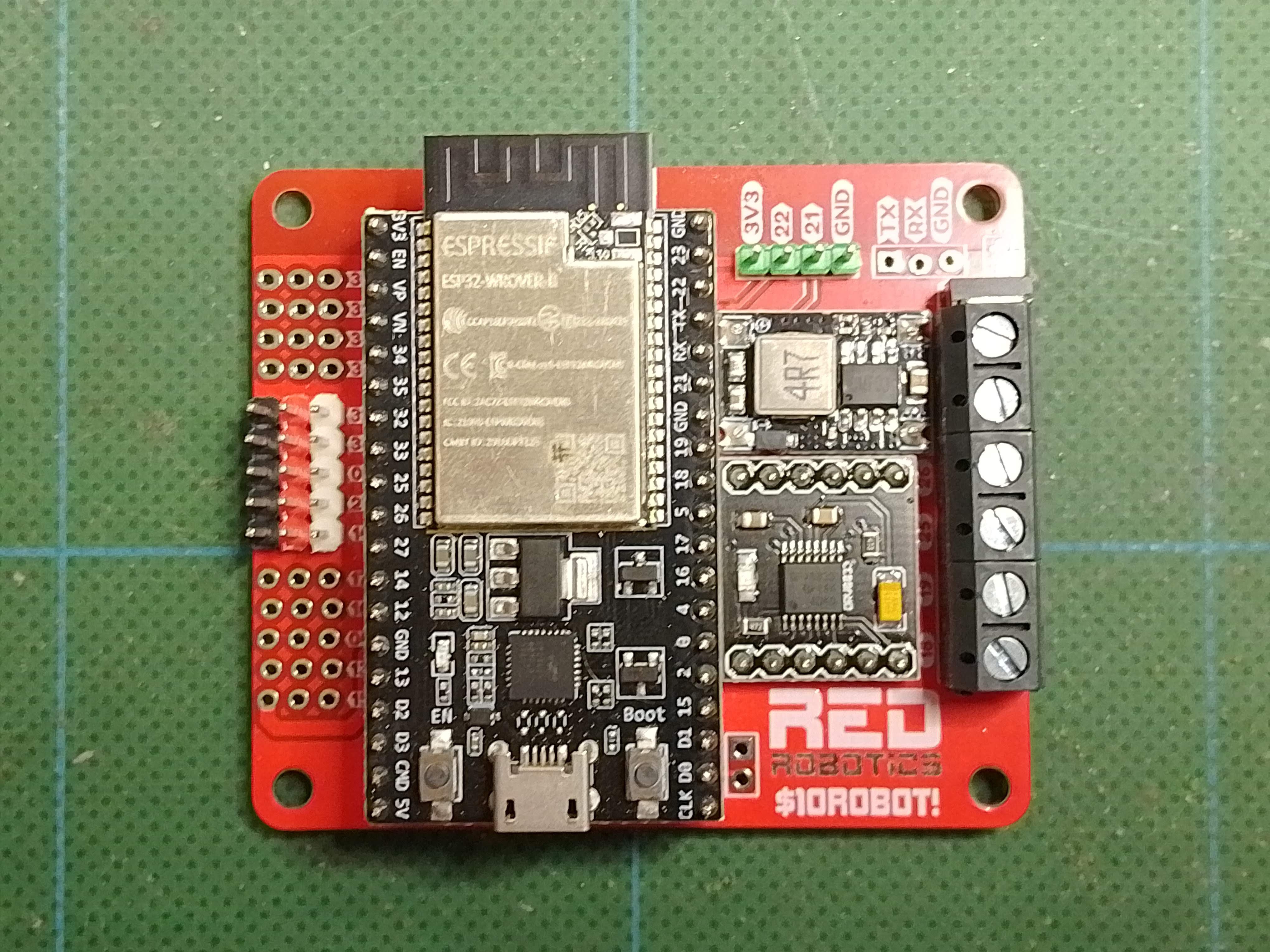
Here's the first board I designed using this shape. It uses the 38pin Wide Devkit as I already had some of these to hand.
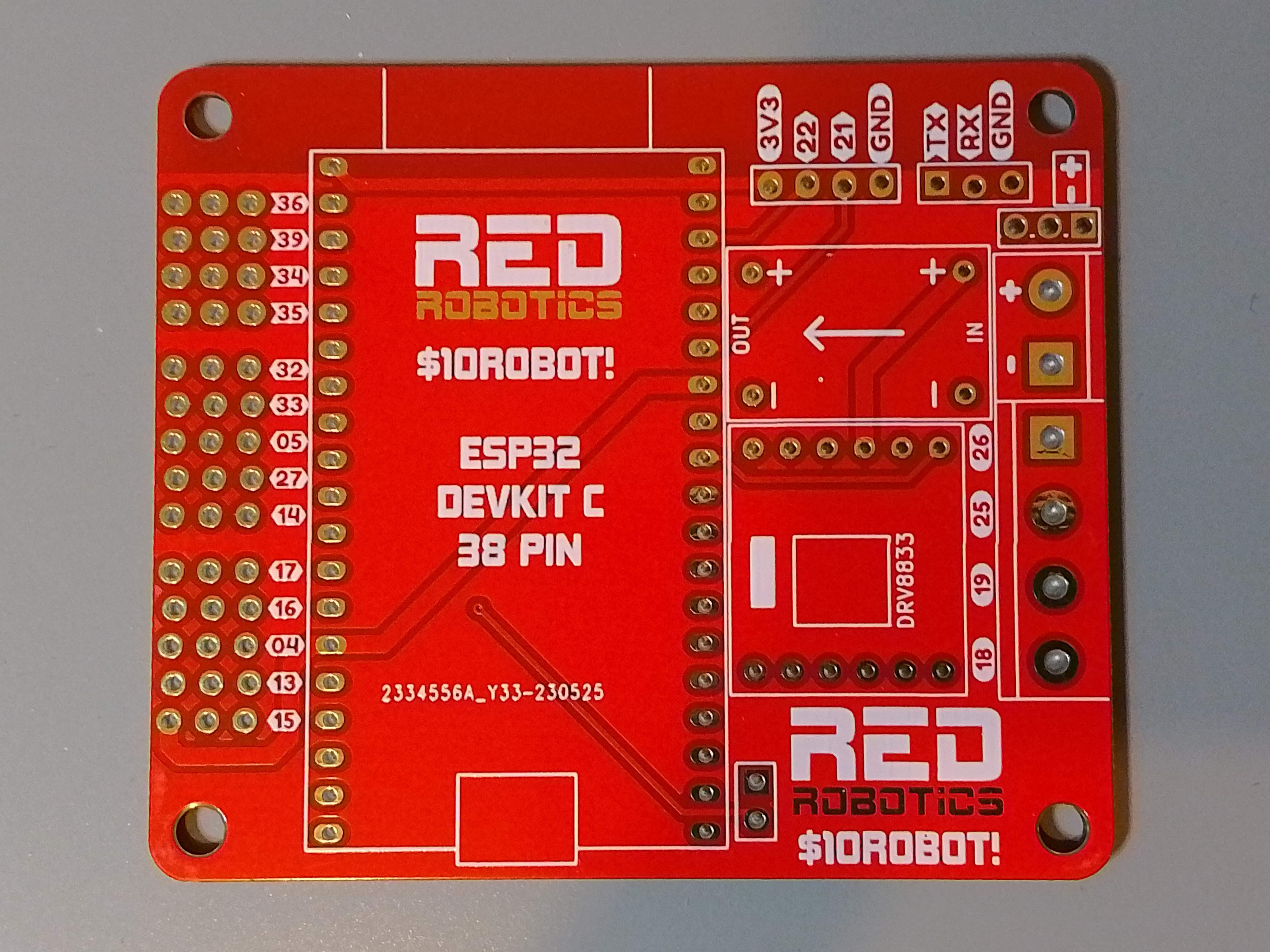
A bonus of this sized board is that it breaks out all of the GPIO pins, so you have the option of making more complicated robots.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.