 Gaultier Lecaillon
Gaultier LecaillonRequirements
Having established our "motors block" we now need a suitable wheel. Our requirements for this wheel are as follows:
- The Diameter
Given that the rotation axis is 29mm high, the aluminum chassis is 3mm thick, and the desired ground clearance for the robot is 7mm, we require a wheel that is exactly 78mm in diameter.
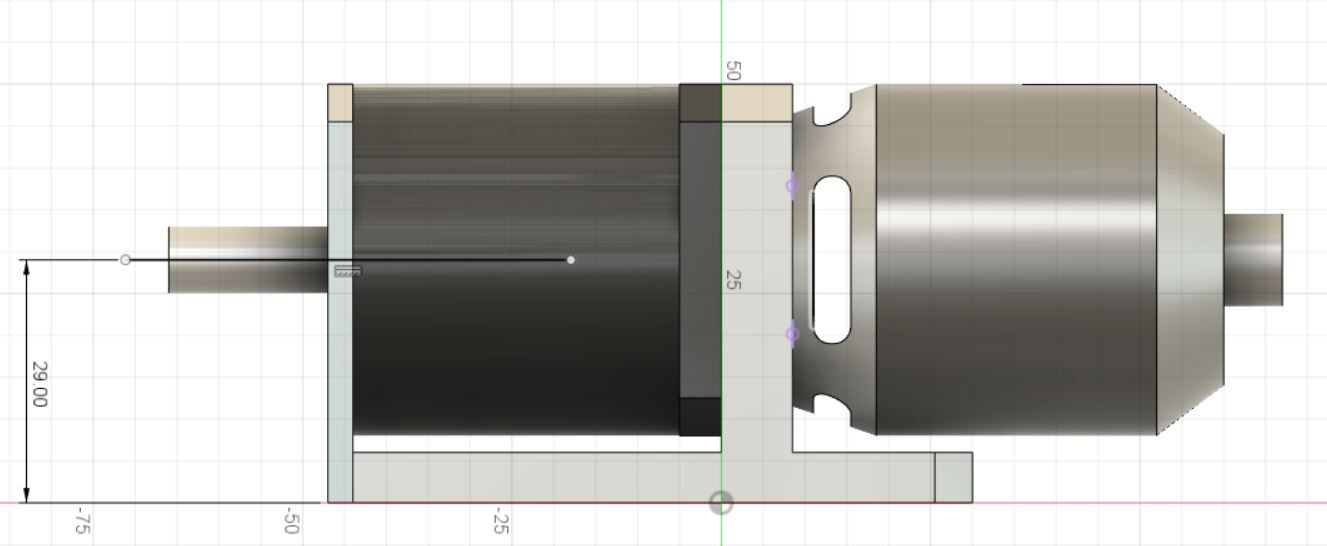
- Thickness
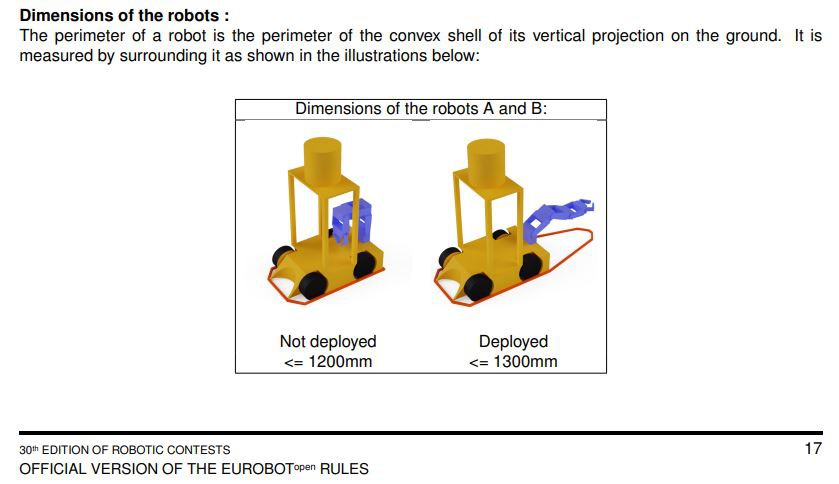
The Eurobot rules stipulate a maximum perimeter for the robot, which permits us to have a wheel thickness between 25 and 30 mm.
- Grip
A good grip is vital for success in the competition. As our goal is precise movement, minimizing drift is essential to guarantee accurate position estimation without offsets. We are particularly interested in wheels with a hardness of 40 to 50 Shore. This specification aligns with softer options like silicone or polyurethane wheels.
- Mounting Hole
The output shaft has a diameter of 8mm, making it compatible with an M3 screw.
Conclusion
Taking into account all these requirements, we quickly recognized that finding such a specialized component in the market is nearly impossible. As a result, we concluded that designing and manufacturing our own wheel is necessary.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.