 Gaultier Lecaillon
Gaultier LecaillonThe RPLIDAR A2M8 by Slamtec is a versatile and compact LIDAR sensor commonly employed in robotics for navigation and obstacle detection.
LIDAR, which stands for Light Detection and Ranging, operates by emitting laser beams and then measuring the time it takes for those beams to return after reflecting off objects. This allows the RPLIDAR to generate a 360-degree map of its surroundings, effectively giving the robot a bird's eye view of its environment. When incorporated into a robot's control system, this data can be used to identify and avoid obstacles in real-time. The rapid scanning capability of the RPLIDAR A2M8, along with its high resolution, ensures that the robot can react promptly to any obstructions, be they static or moving.

By integrating the RPLIDAR A2M8's data with path planning algorithms, robots can smoothly navigate through complex environments, avoiding collisions and ensuring efficient and safe operation.
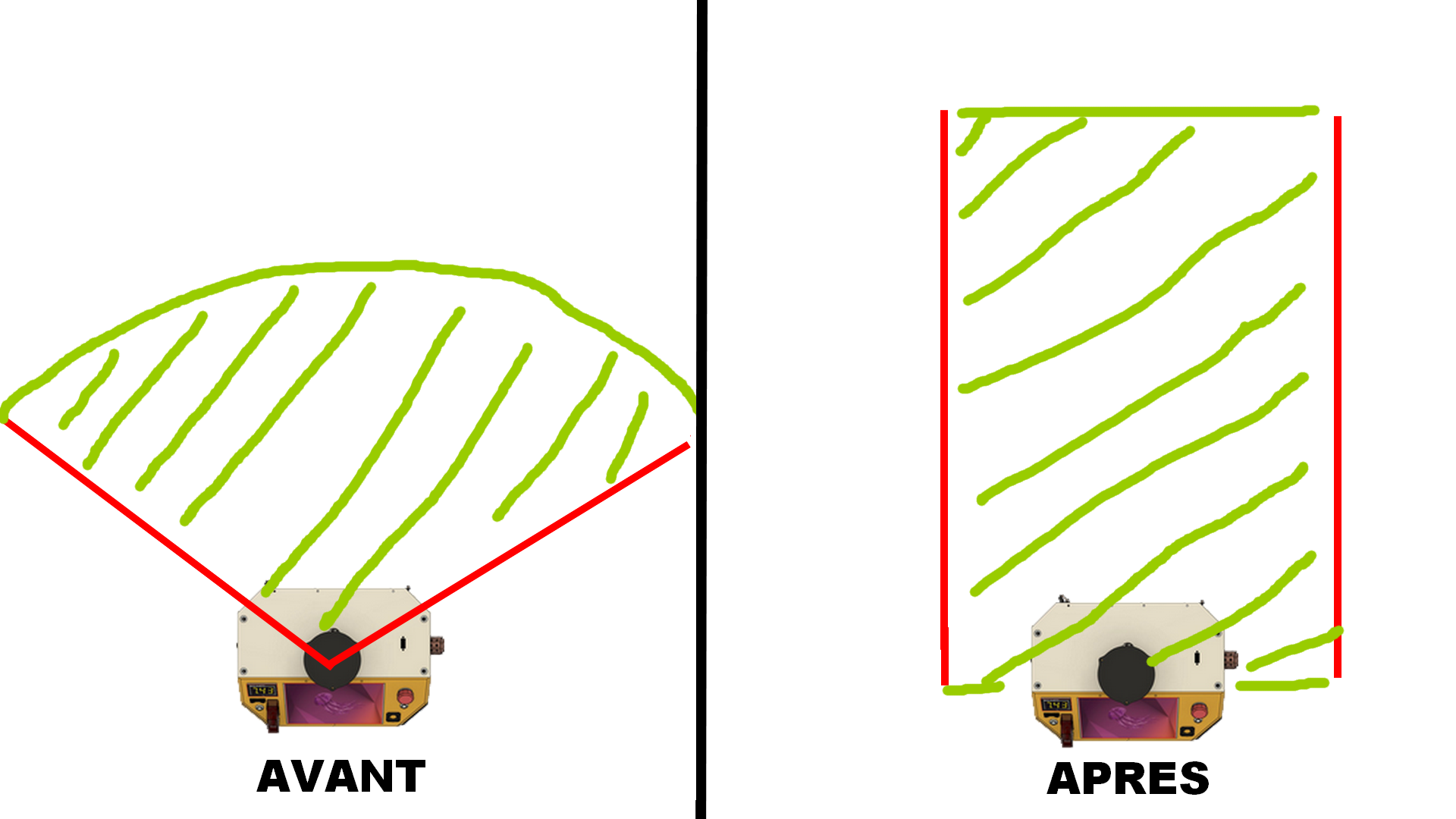
At first, we utilized a defined angle in front of the robot. If any obstacle was detected within this zone, we would halt the robot. However, this technique resulted in many blind spots and unnecessary stops. We now prefer to observe the area in front of the robot using a rectangular shape
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.