 Petar Crnjak
Petar CrnjakThere are six types of industrial robots:
• Vertically articulated.
• Cartesian.
• Cylindrical.
• Polar.
• Selective compliance assembly robot arm (SCARA).
• Delta
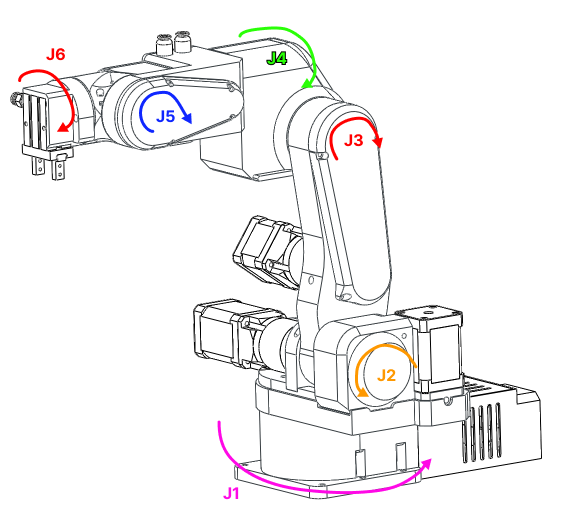
PAROL6 falls in the category of vertically articulated 6 axes robotic arms.
6 axes means it has 6 joints in our case 6 rotational joints. Joints are connected with links.
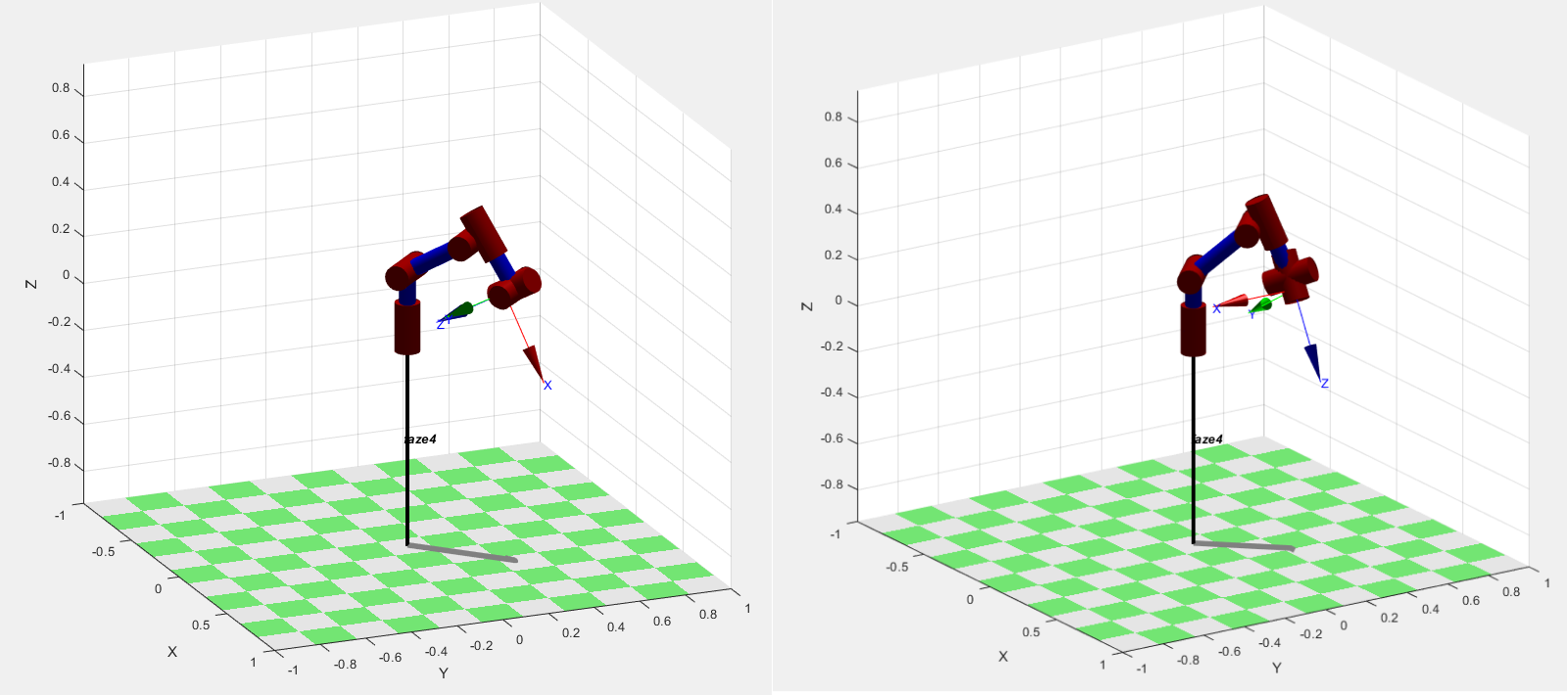
The advantage of robot arms of this type is that they can get to the same position in space with different orientations. Both pictures show the arm at position x=0.3m, y=0.3m, and z=0.2m but as you can see orientations are different. Robot's pose in 3D space is described by the position and orientation ( rotation) of the robot's end effector in 3D space.
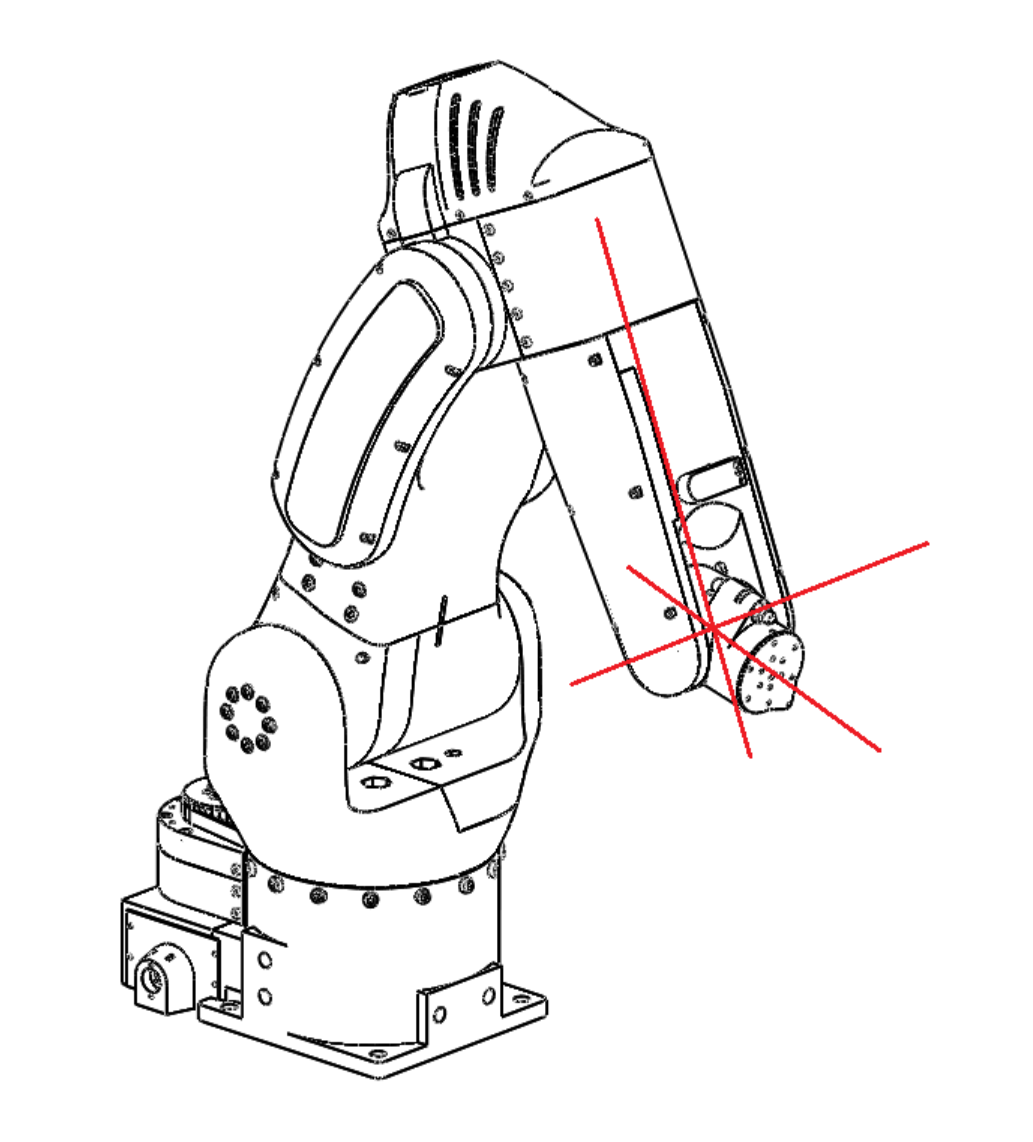
The first 3 axes are used to position the end effector in cartesian space while the last 3 joints are used to change the end effector orientation. PAROL6 uses a popular configuration where the axes of rotation of the last 3 joints intersect. That configuration is called a spherical wrist and is one of the most common configurations you will see in industrial robots. A spherical wrist allows for much easier and faster calculation of inverse kinematics. You can see an example of a spherical wrist on the example of Faze4 robotic arm in the image below.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.