The first launch with the first version of the board computer was a great success!
Everything was captured by the boardcomputer and the rocket landed only a couple of meters from the launch pad.
Information of the launch:
65g Rocket
16g motor with 10g propellant (B4-4)
Boardcomputer v1.0 30g
apogee: 60m
Data:
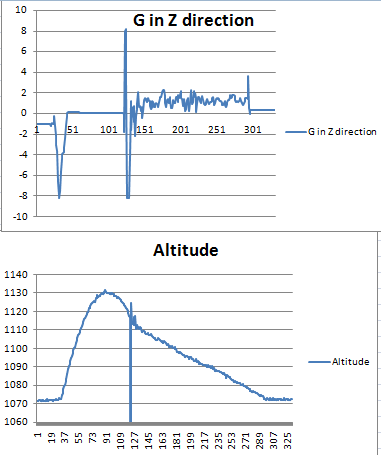 Unfortunately I set the accelerometer to +-8g per axis and this wasn't enough so there is a cut off. A very interesting thing to note is the downwards spike in altitude. Since I measure the altitude via the airpressure the explosive charge that sets off the parachute caused this wrong reading.
Unfortunately I set the accelerometer to +-8g per axis and this wasn't enough so there is a cut off. A very interesting thing to note is the downwards spike in altitude. Since I measure the altitude via the airpressure the explosive charge that sets off the parachute caused this wrong reading.
Next I want to try to implement the gyro.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.