 BastelBaus
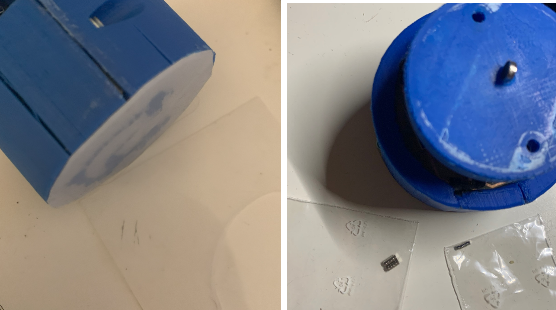
BastelBausI added a silicon piece at teh bottom of the knob to increase the friction (plastic was quite slippery on my table) and now it seams to be quite good (left picture). The much smaller magnets also arrived and they are really tiny (right picture in the bags, 2x1mm and 1.5x0.5mm, NdFeB N48, 1.42Tesla). When trying them out I nearly lost them. I have to design a new top for them to be able to mount them proper.
Next I tried to use the acceleration sensors to estimate the linear displacement by double integration (acceleration--> velocity-> displacement) but found out this will not be so easy. After soem strange results I estimated the aceleration, 1Hz moving the head with about 5mm displacement would give an acceleration of (2*pi/s²)^2*5mm = 0.2m/s² which is not too big for the used measurement range setting of 2g (~200m/s²). I recognized also, that very small rotations will lead to measure the change of the earth gravity field in much higher magnitudes. Following charts shows the measured acceleration (ax,ay,az) and the estimated acceleration caused by the earth gravity field (gx/gy/gz) by teh rotation of the top.
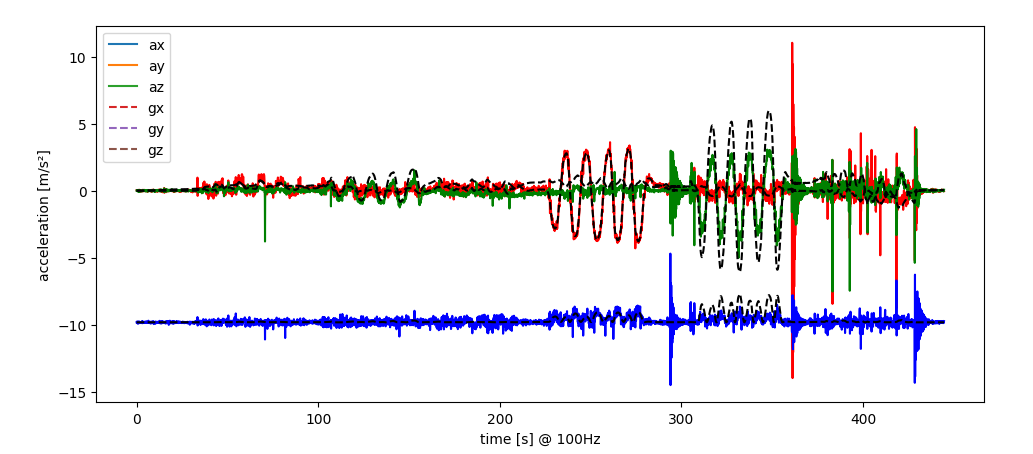 The black dashed lines are the main contribution of total measured acceleration. And even by integrating the offset compensated accelerations, the velocity and displacement had to much other effects as to see the linear displacement. With good eyes, one can see the velocity changes in the first three phases (20 ... 220s) but latest with the displacement, the integration error made everything invisible.
The black dashed lines are the main contribution of total measured acceleration. And even by integrating the offset compensated accelerations, the velocity and displacement had to much other effects as to see the linear displacement. With good eyes, one can see the velocity changes in the first three phases (20 ... 220s) but latest with the displacement, the integration error made everything invisible.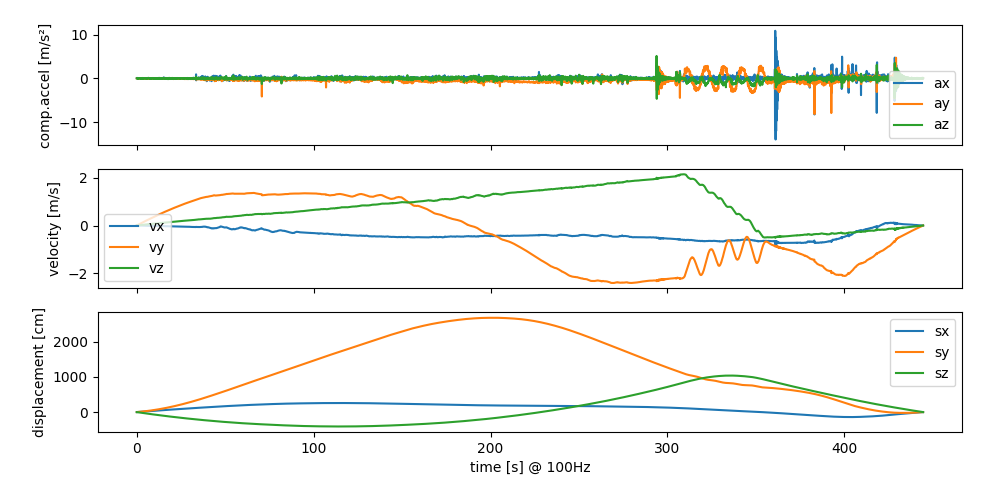 How to continue ..... don't know yet ...
How to continue ..... don't know yet ...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.