 Tamas Feher
Tamas FeherOnce a set of high-level requirements was allocated, the next step is to start breaking down the project into subsystems. The next diagram shows the high level block definition diagram of the system.
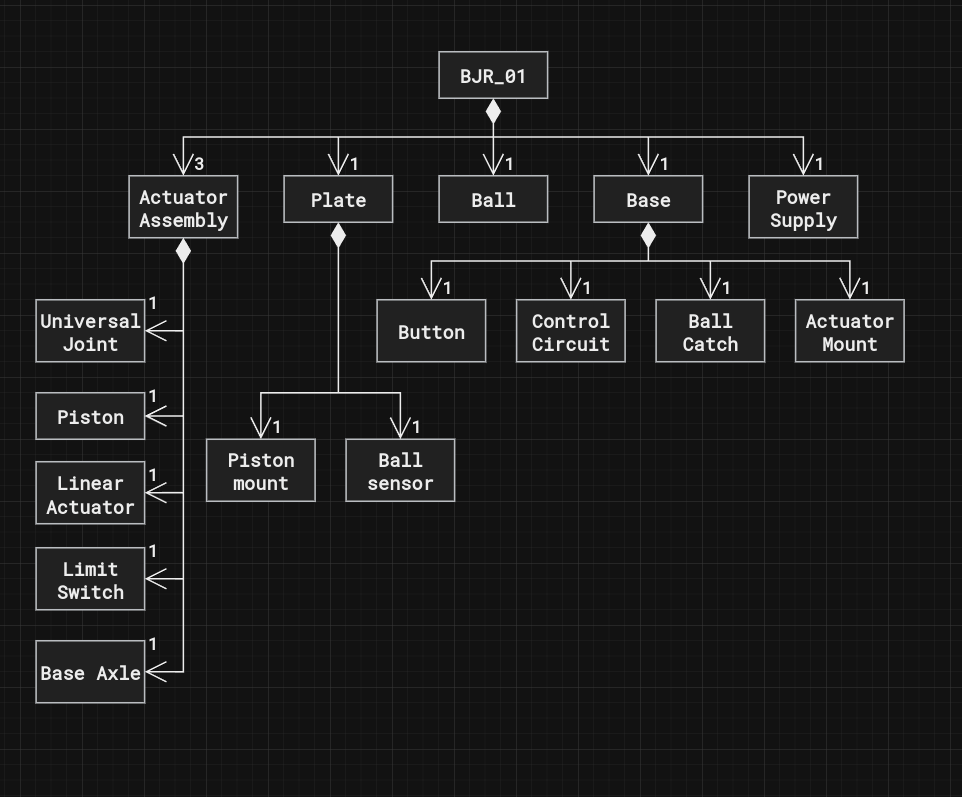
Once we have the high level Items declared, the next step is to define how they interact with each other. This is usually done through the introduction of ports and connections.
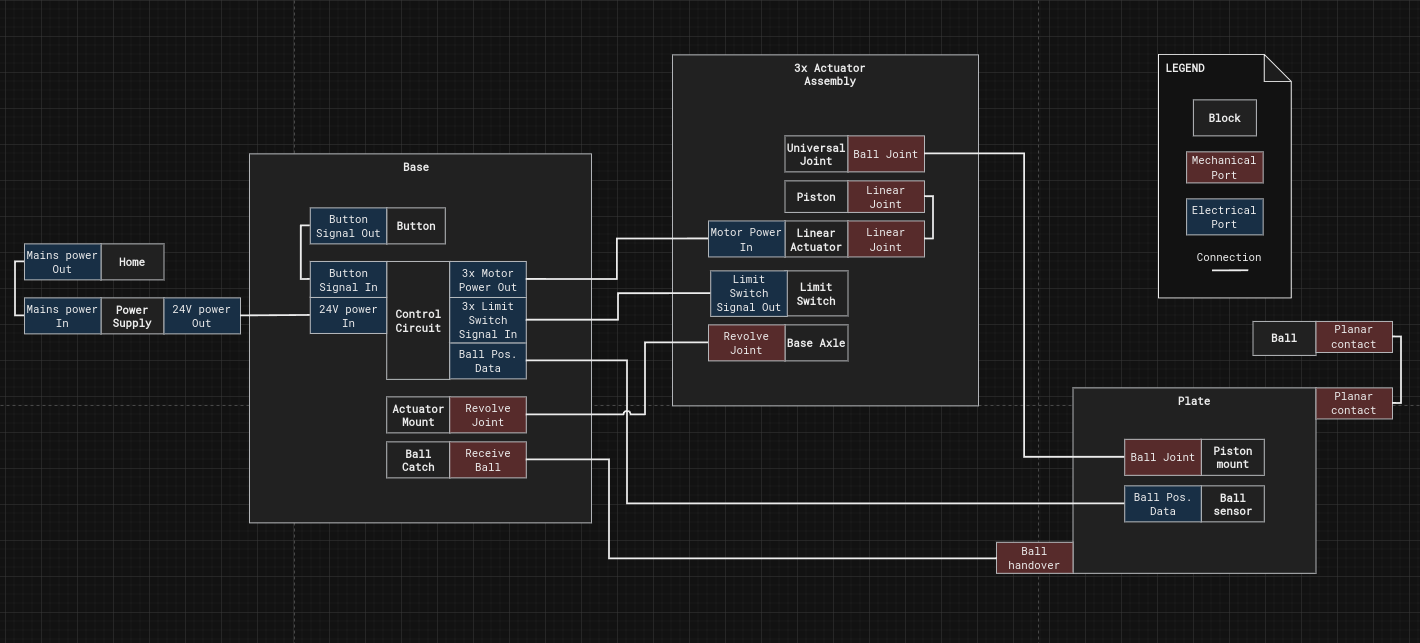
I will not represent fastened connections on this diagram as it just makes the view cluttered.
The ports are represented as coloured flags attached to the blocks.
Red color means mechanincal connecitons, and blue color means electrical connections.
This view will help us when we narrow our focus to each of these elements.
The kinematic arrangement I'm using is called the 3-RPS parallel manipulator
Shout out to Aaed Musa for the great video he published on a ball balancing robot using the same arrangement. The video can be found here.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.