 Satoshi Tanaka
Satoshi TanakaThis project began in the summer of 2023 when I found cheap mecanum wheels on Amazon.
I quickly started building an omnidirectional robot platform using these wheels.
It was driven by DC motors and the position was closed-loop controlled using two optical mouse sensors.
Also it had a stepper-driven lead screw for Z-axis movement of the tool head.
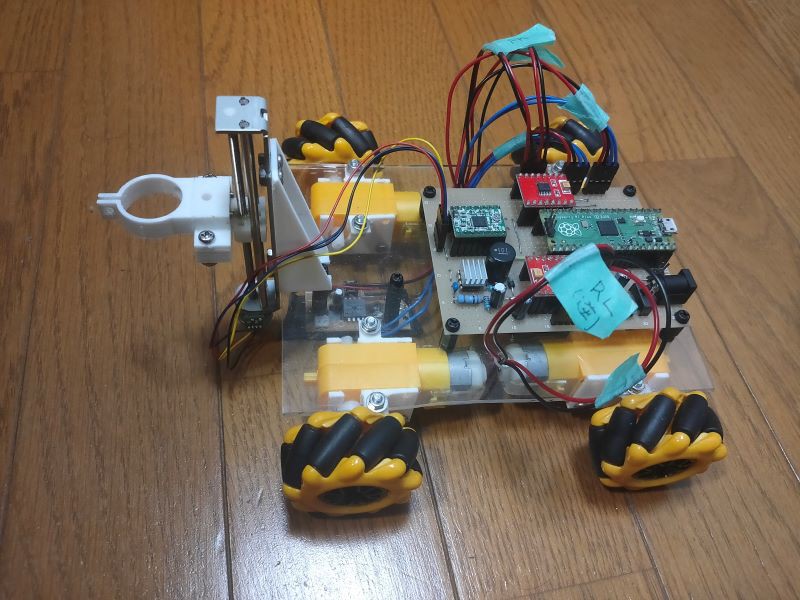
As the first step before 3D printing, I attached a pen to test the precision of movement.
The microcontroller (Raspberry Pi Pico) ran a firmware (written in Rust) that interpret G-codes and control the motors to exactly follow the specified tool path.
As you can see in the video above, the drawn figure contained some glitch.
Furthermore, the length of the lines were not accurate.
I suspected it was because of the inaccuracy of odometry using mouse sensors and unpredictability of movement using mecanum wheels.
Now, I am building a new platform using more conventional wheels.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.