 Bare Naked Embedded
Bare Naked EmbeddedFor full details on the build, check out my part one YouTube video!
0%
0%
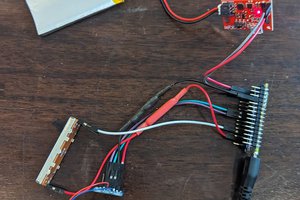
DIY e-kayak
The e-bike of kayaks. My AI powered kayak will detect if the user is turning left or right and automatically assist with the electric motor
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Eric
Eric
 hfor62
hfor62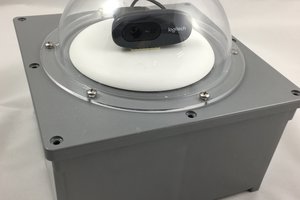
 John Leeman
John Leeman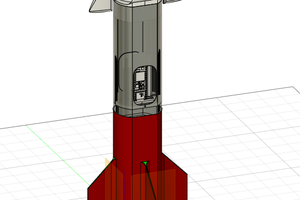
 Hunter Santana
Hunter Santana