Trying a different approach, I took a whole bunch of raw sensor readings whilst holding/moving/rotating different coloured bricks in front of the sensor, at a variety of distances from 5mm to about 20mm. Then imported the readings into Matlab so that I could scatterplot them in 3D (rgb-space) and observed that all the points relating to a certain brick formed a straight line. One end tends towards the origin (black, i.e. poor illumination) but the other end does not tend towards (1,1,1) i.e. white. This means that the shade or hue(1) of each brick does not change with distance or brightness of illumination. We humans might see a white, specular flash from a shiny face, but the sensor just sees brighter red (or whatever colour). I'm sure this effect is obvious and well-known, just not to me.
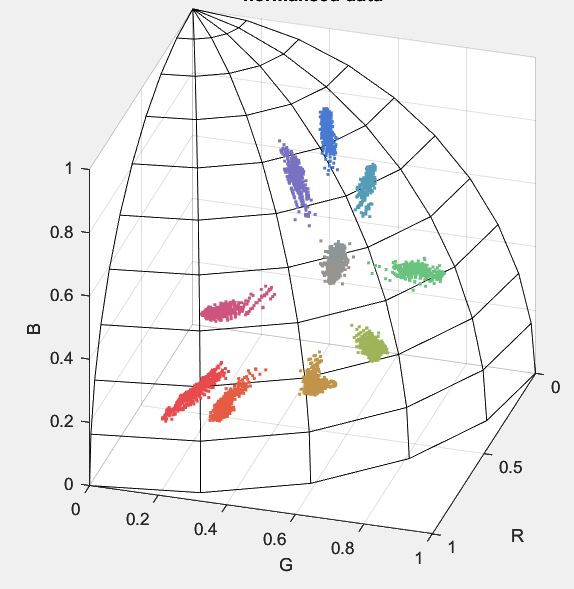
I think it means, as I suspected, that I can classify the bricks' colours by normalising the rgb values to account for brightness of illumination, resulting simply in hue and ignoring brightness. The down-side is that black, grey and white bricks all get classified the same, and cannot be separated. Maybe that's not a problem, at least for now.
It's also surprising how much 'desaturation' there is, e.g. the green and blue channels show significant responses when shown a 'red' brick. Perhaps it's correct, or perhaps I'm getting light from the illuminator LED scattering directly onto the sensor by accident.
(1) Not really 'hue', since it includes all levels of saturation including grey, so really it's a mix of hue and saturation.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.