 Nguyen Vincent
Nguyen VincentAmulet was developed specifically to be integrated in our custom quasi-direct drive actutators for a quadruped robot. We've decided to develop our own motor controllers to have the highest amount of flexibility when it comes to some of the most crucial hardware.
The amulet controller is a modified version of the moteus controllers, providing higher peak power, thermals and cooling capabilities and more. It runs a modified fork of the moteus firmware.
| Name | ΛMULET V1.0 |
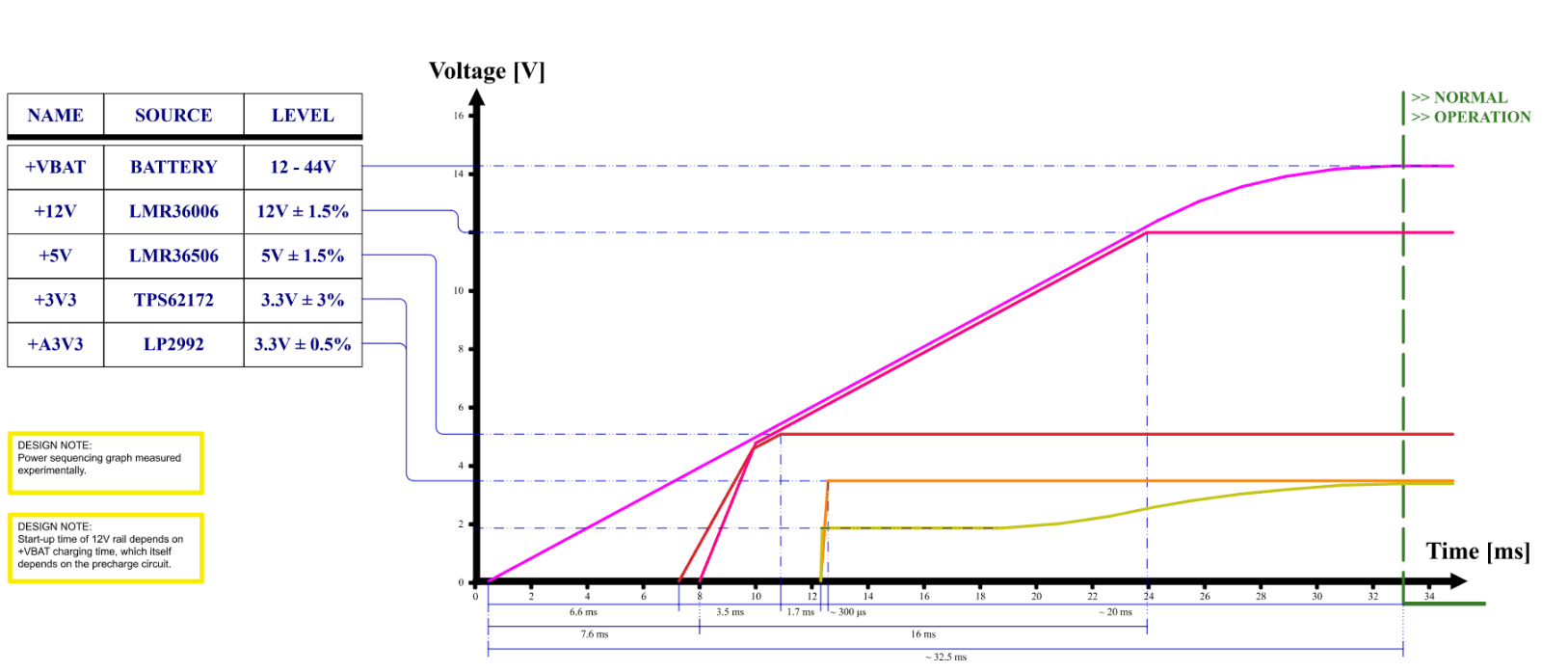
| Voltage Input | 12-44V |
| Peak Phase Current | 100A (to be further tested) |
| Peak Electrical Power | 1500W (to be further tested) |
| Communication | 5Mbps CAN-FD |
| Cooling | Low-side switched 12 fan |
| Positioning | 2x Onboard 14-bit Encoders |
| PWM Switching Rate | 15-60kHz |
| Control Rate | 15-30kHz |
| MCU | STM32G474 |
| Dimensions | 69.7 x 76.7mm |
| Mass | TBD |








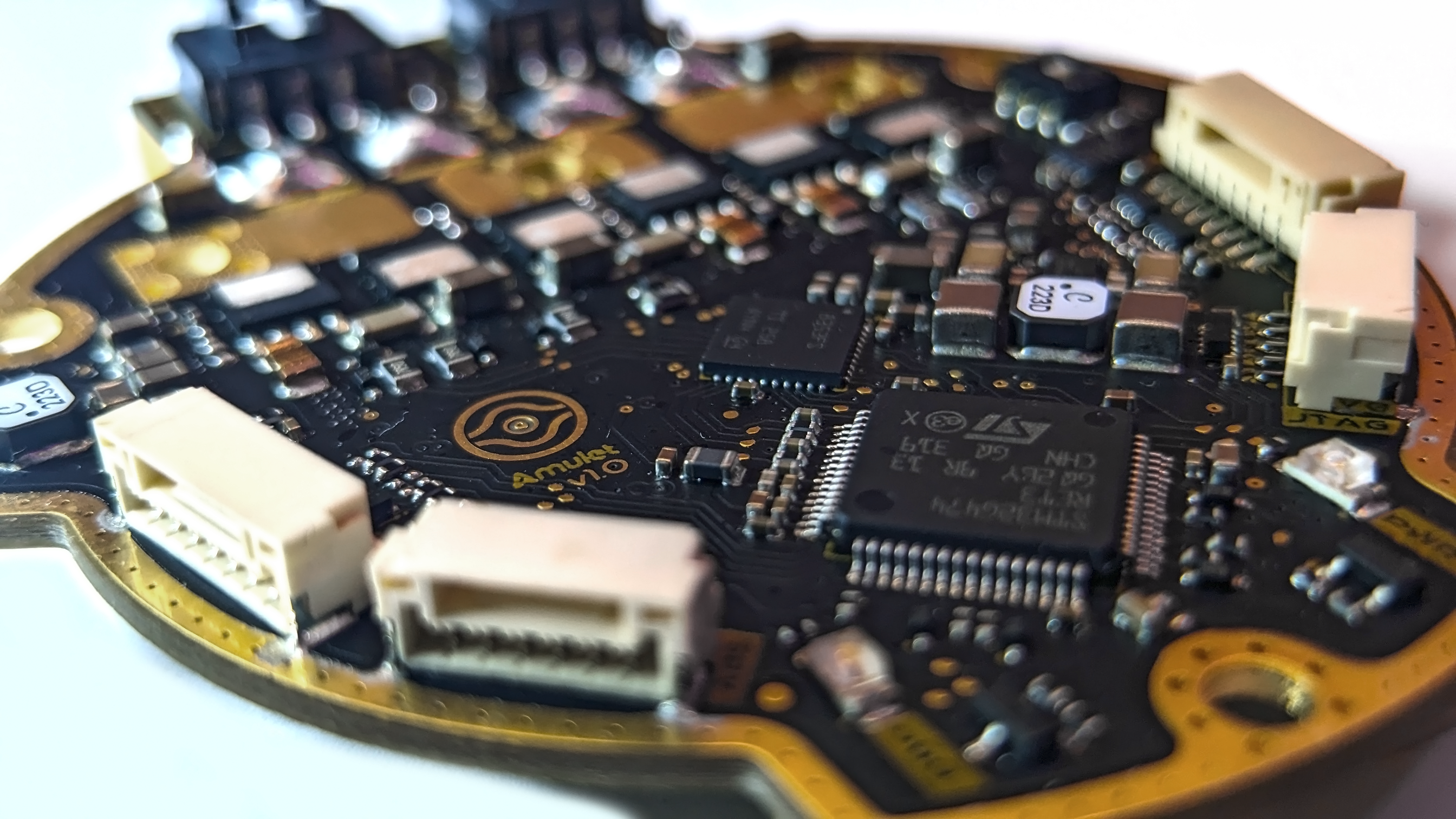
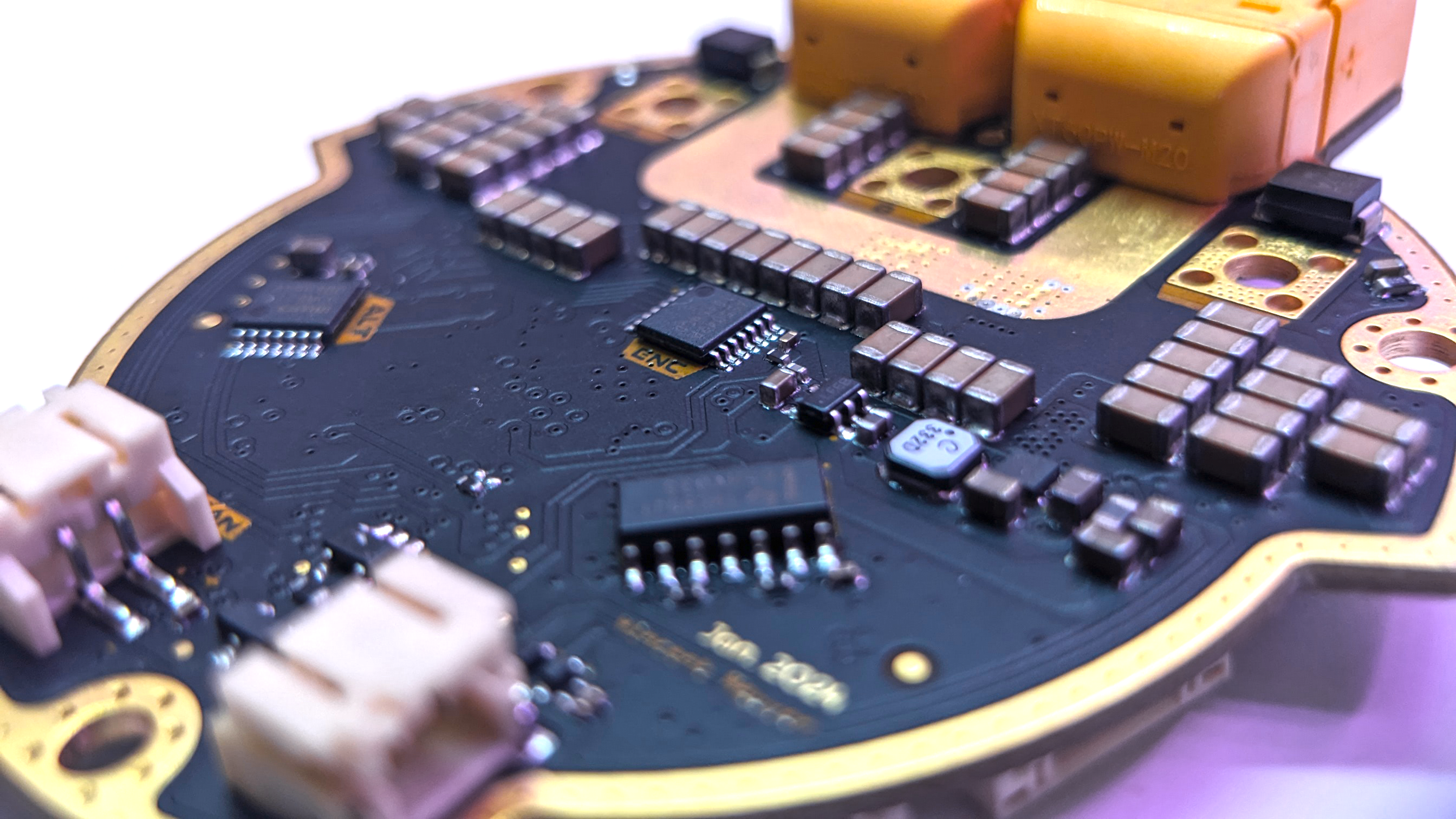

 The first inner layer is dedicated to analog signals and a few power planes. special care was taken to route the kelvin sense connection as far as possible from noisy signals. They are surrounded on both adjacent layers by a solid ground plane, and no return currents from any layer are present in the ground planes above and below the kelvin traces.
The first inner layer is dedicated to analog signals and a few power planes. special care was taken to route the kelvin sense connection as far as possible from noisy signals. They are surrounded on both adjacent layers by a solid ground plane, and no return currents from any layer are present in the ground planes above and below the kelvin traces. Special care was taken in the layout of layers 3 and 4. As can be seen on the pictures, no signals ever cross each other on these two layers. This was done to avoid any potential crosstalk between these layers, as the dielectric thickness is quite thin (only 0.18mm, which is thinner than the space between L2-L3 or L4-L5).
Special care was taken in the layout of layers 3 and 4. As can be seen on the pictures, no signals ever cross each other on these two layers. This was done to avoid any potential crosstalk between these layers, as the dielectric thickness is quite thin (only 0.18mm, which is thinner than the space between L2-L3 or L4-L5). The 6th layer is dedicated to positioning sensors, bulk capacitors, power regulators and a few other interfaces (thermistor and fan).
The 6th layer is dedicated to positioning sensors, bulk capacitors, power regulators and a few other interfaces (thermistor and fan).





 oneohm
oneohm
 Reed Foster
Reed Foster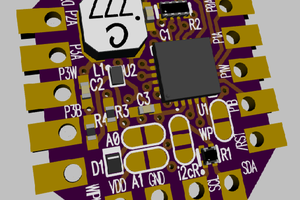
 Chris Hamilton
Chris Hamilton
 Dave's Dev Lab
Dave's Dev Lab
If you ever want to go in-line current sense and cut out some power loss from the triple shunts, check out this new ACS37220 part: https://www.allegromicro.com/en/products/sense/current-sensor-ics/fifty-to-two-hundred-amp-integrated-conductor-sensor-ics/acs37220