 Simon Trendel
Simon TrendelThe next step was to retrieve IMU data from our tracked objects. Even though the de0-nano comes with an accelerometer, we are using an external MPU6050. They are quite cheap, like 3 euro and come with accelerometer, gyroscope and the Digital Motion Processor, which fuses the sensor values to useful stuff, like eg quaternion, gravity. The data is retrieved on the ESP8266 which uses I2C to communicate with the MPU6050. The MPU6050 has an extra interrupt pin, which signals data availability. This interrupt pin is routed into the fpga and the connection controlled there. This is necessary because we are using gpio2 on the esp, which needs to be low on boot from internal flash (if gpio2 is high, this means boot from sd card). We also progressed on the command socket infrastructure, which allows rudimentary control of hardware from the GUI (we can now reboot the esp for example, or toggle IMU streaming). In the video below you see the quaternion from the MPU6050 DMP estimation streamed into our rviz plugin and visualized with the red cube.
The orientation looks very stable, so we hope to skip the bloody epnp stuff...we will see.
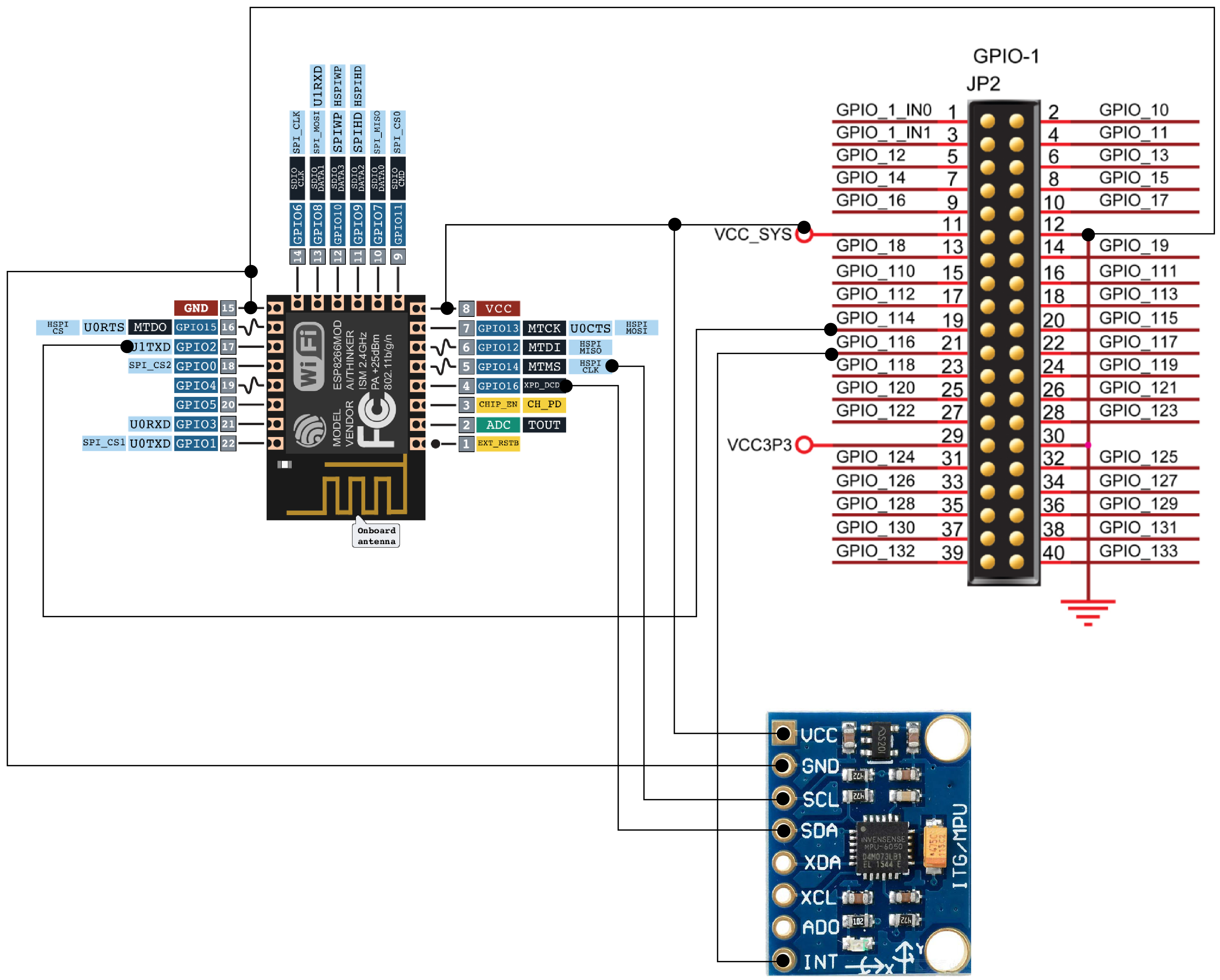
Below you can see how the MPU6050 is wired up to the esp and the de0-nano.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Great job, how could the MPU6050 connect directly to the De0 nano?
Are you sure? yes | no