 Ivan Hernandez
Ivan HernandezPhase 1: Electronics Selection
The initial phase was crucial for setting the foundation of the IMU balance node. Our primary goal was to select the most suitable electronic components that would ensure precision, reliability, and seamless integration into our system.
- IMU Selection: We selected the BMI270 and BMI150 IMUs for their advanced features and proven reliability. The BMI270, with its high-performance accelerometer and gyroscope, provided excellent motion sensing capabilities. The BMI150 was chosen for its compact size and efficient power consumption. Together, these sensors offered a balanced solution for accurate motion tracking and low power usage, which were essential for our application.
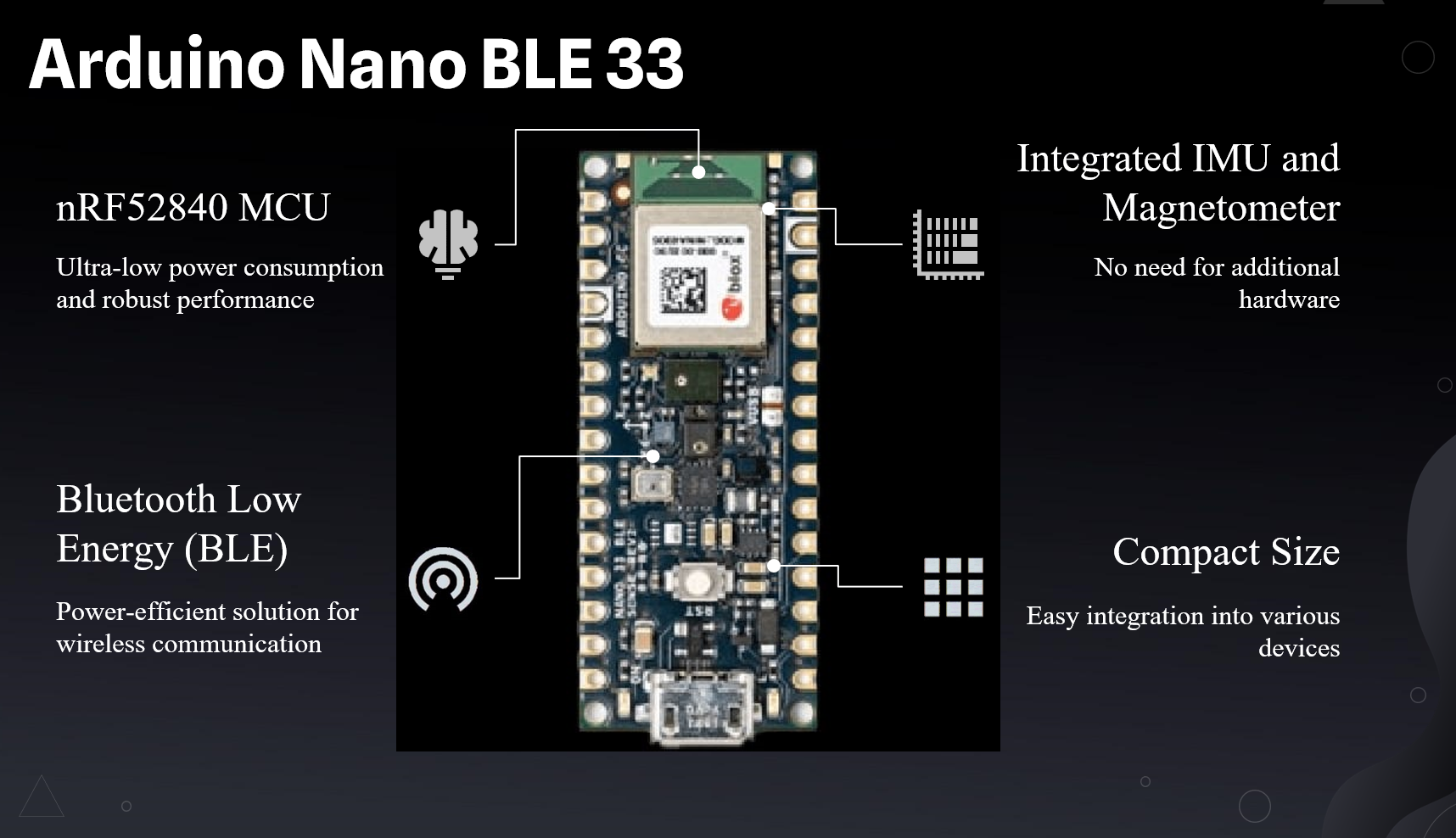
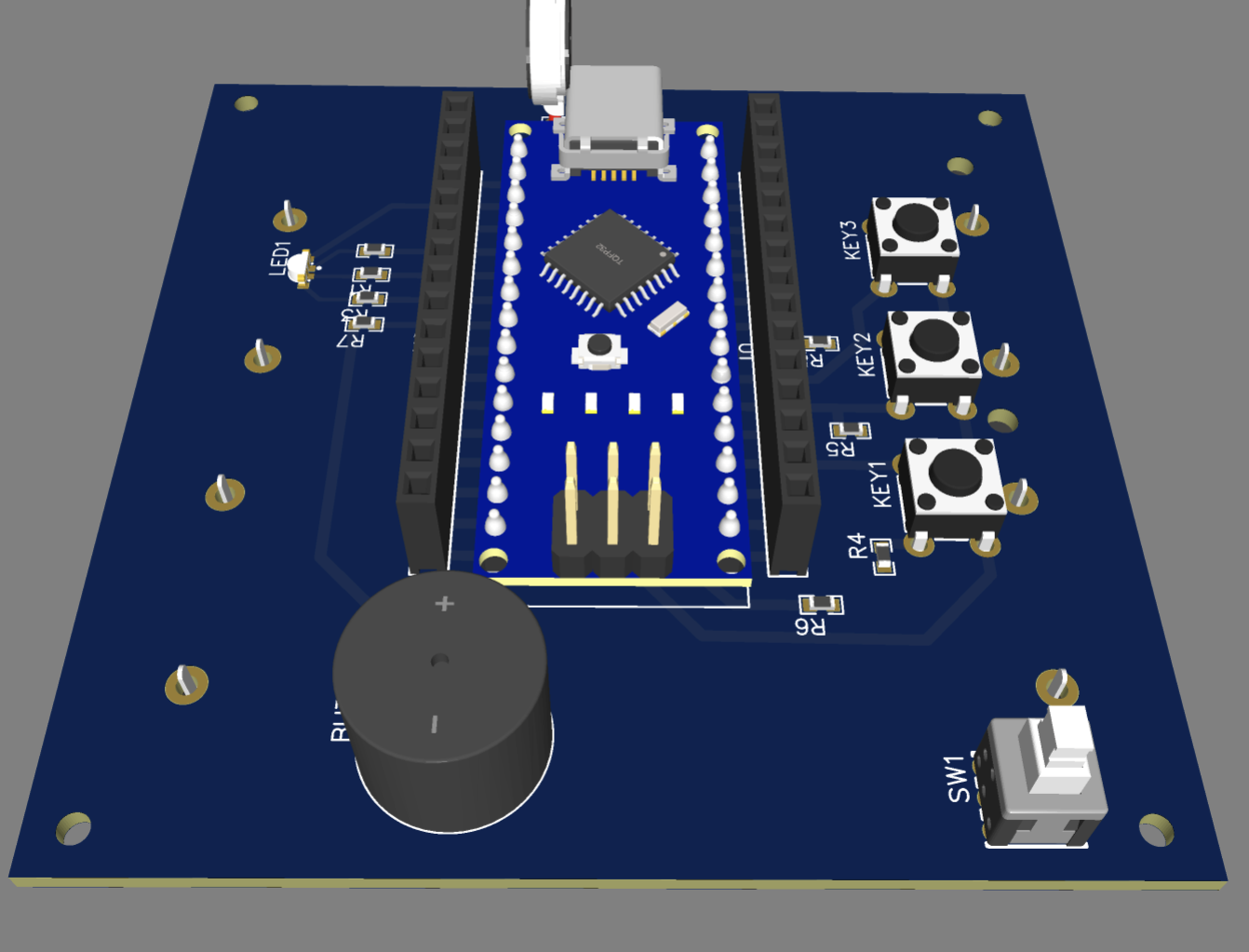
- Microcontroller Selection: The Arduino Nano BLE 33 Rev2 was chosen as the central microcontroller for the IMU balance node. This board was selected for several key reasons:
- Bluetooth Low Energy (BLE) Connectivity: The integrated BLE module facilitated seamless wireless communication between the sensors and the main application, essential for real-time data transmission.
- Processing Power: The 32-bit ARM Cortex-M4 processor provided ample processing power to handle real-time data acquisition and processing tasks.
- Compact Form Factor: The small size of the Arduino Nano BLE 33 Rev2 allowed for easy integration into the overall system design without compromising on performance.
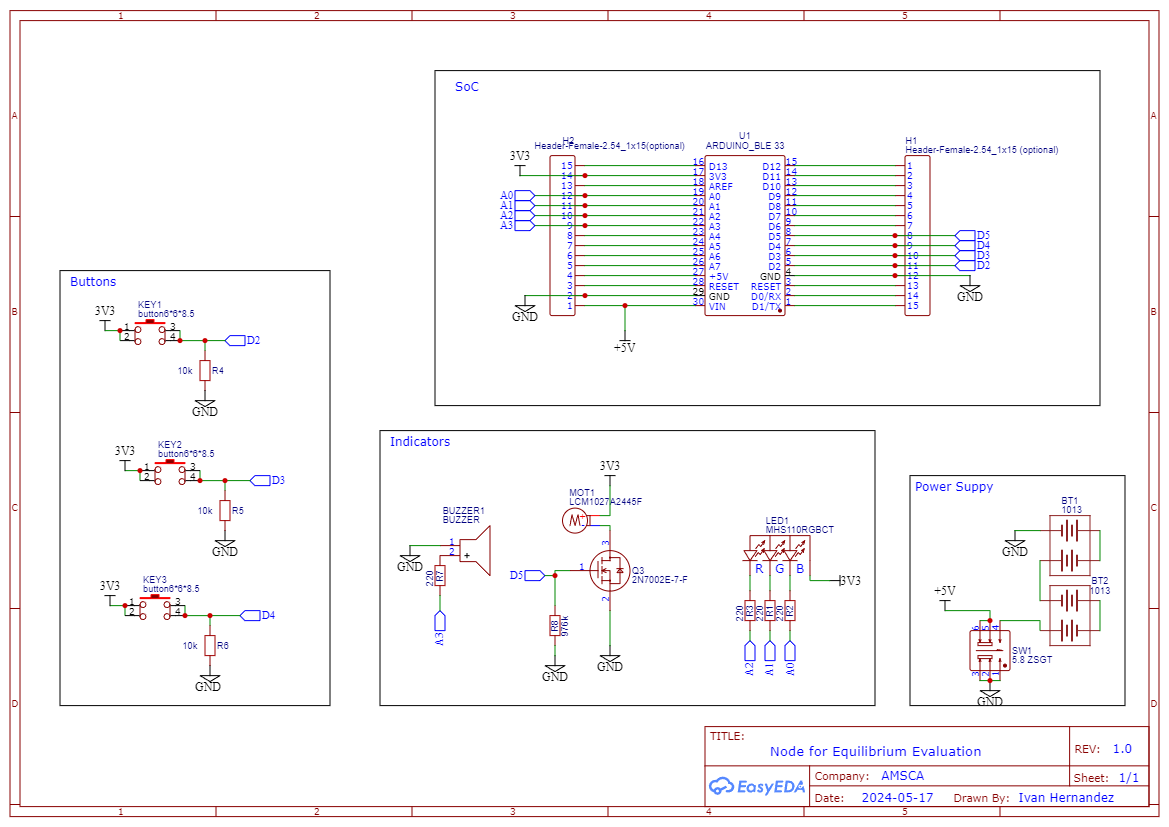
- Additional Electronics: To support the IMUs and the microcontroller, we incorporated various supporting electronic components:
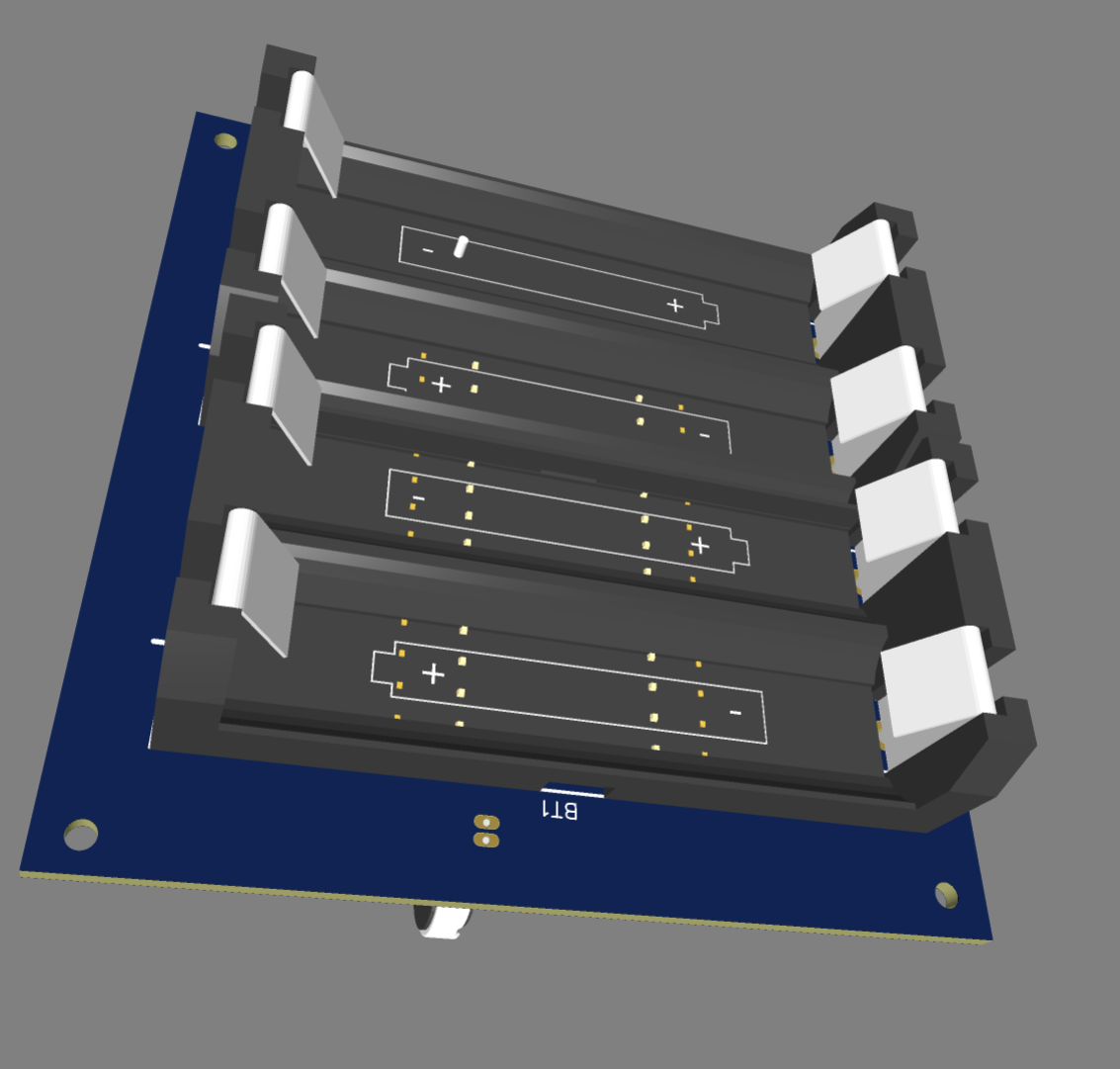
- Power Management: Efficient power regulation circuits were designed to ensure stable power supply to all components, including voltage regulators and capacitors for noise reduction.
- Connection Interfaces: Headers and connectors were carefully selected to facilitate easy assembly and reliable connections between the sensors, microcontroller, and other peripherals.
- Push buttons.
- RGB Led.
- Buzzer.
- Vibration Motor.
Phase 2: Initial Circuit Design and Prototyping
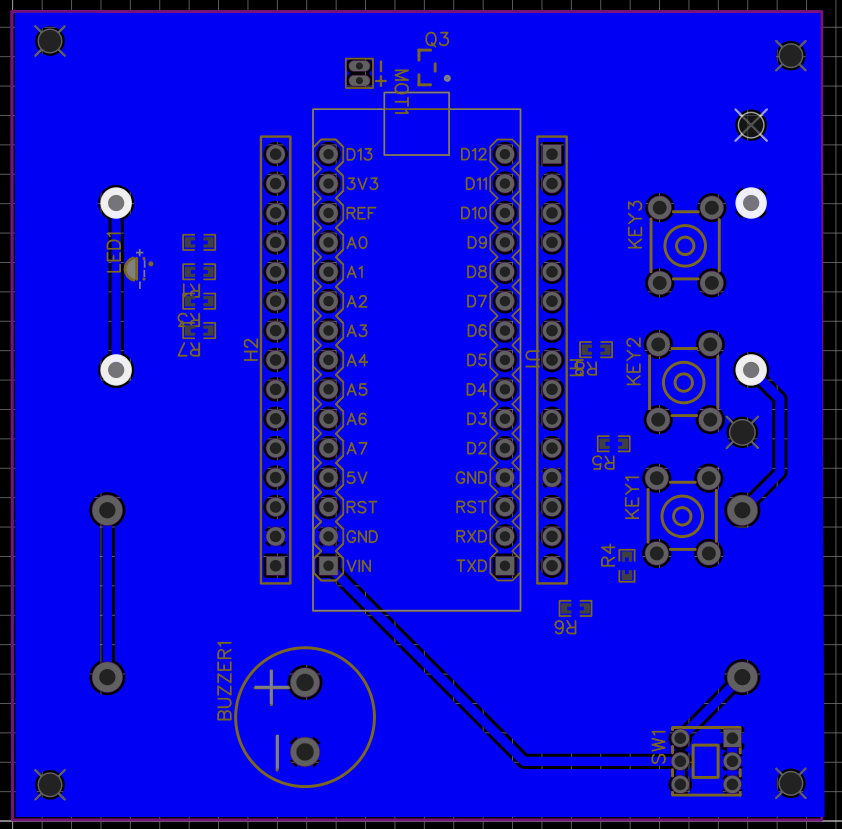
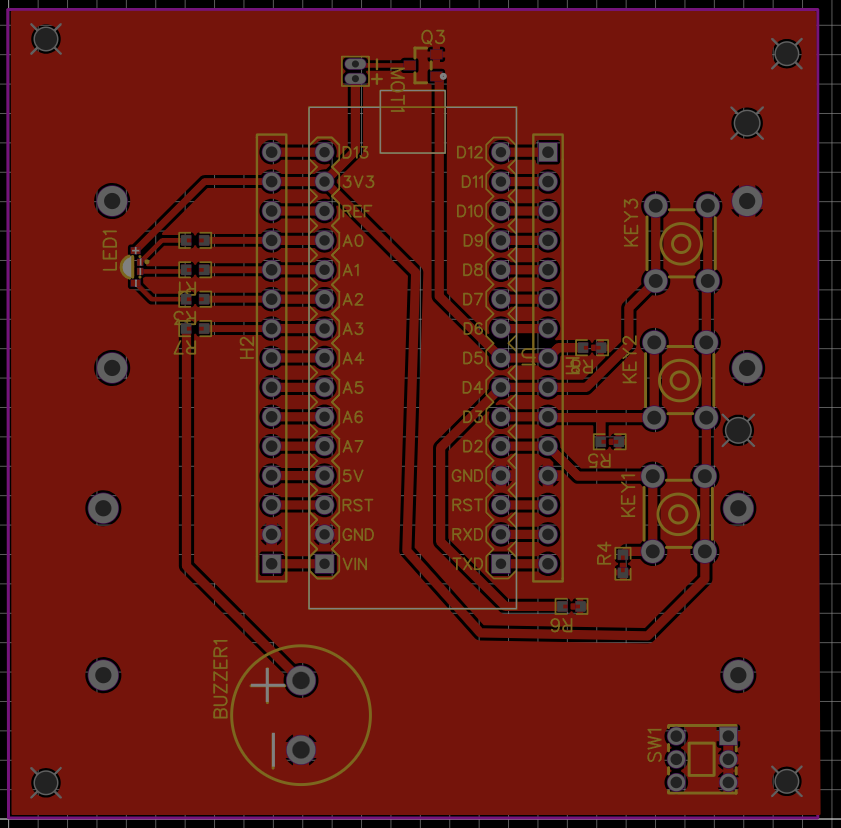
The initial phase focused on designing the circuit for the IMU balance node. We began by selecting appropriate IMUs, settling on the BMI270 and BMI150 for their precision and reliability. Using tools like EasyEda Designer, we drafted the initial schematic and created prototype PCBs. These prototypes were essential in understanding the basic requirements and limitations of our design, ensuring a solid electronic foundation for further development.
Phase 3: Sensor Integration and Communication Protocol
In this phase, we integrated the BMI270 and BMI150 sensors with the Arduino Nano BLE 33 Rev2. Developing a robust communication protocol was critical, so we implemented a BLE (Bluetooth Low Energy) protocol to facilitate seamless data transmission between the sensors and the main application. This involved writing and testing code to ensure reliable data acquisition and transmission, laying the groundwork for real-time monitoring.
Phase 4: Firmware Development and Calibration
Firmware development was undertaken to process and manage the sensor data. Using the Arduino IDE, we wrote firmware to capture and filter raw data from the IMUs. We implemented the Madgwick filter for sensor fusion, which significantly improved orientation estimation. Calibration routines were developed to ensure accuracy, involving extensive testing to fine-tune the sensor readings and eliminate drift.
Phase 5: System Integration and Testing
The IMU balance node was integrated with the overall system, including the vision system. Comprehensive testing was conducted to ensure all components worked harmoniously. We focused on synchronizing data from the IMUs with the vision system, validating the accuracy and reliability of the combined data. This phase involved iterative testing and refinement, ensuring that the system met performance expectations.
Phase 6: Optimization and Power Management
Optimization efforts were undertaken to enhance the efficiency and performance of the IMU balance node. We refined the firmware to reduce latency and improve data throughput. Power management features were implemented to extend battery life, ensuring that the device could operate for extended periods without frequent recharging. These optimizations were crucial for the practical deployment of the system in real-world therapy settings.
Phase 7: Documentation and Deployment
Comprehensive documentation was prepared, detailing the design, development, and usage of the IMU balance node. see on GitHub
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.