A lot of work has already gone in this project behind the scenes. I use this opportunity to learn more about ROS and robotic simulation using V-REP. I made a tutorial a while ago about how to simulate a robot using V-REP and interact with ROS, it was even featured on Hackaday. I'm now using the same approach for ATOM.
Basically this allows me, to some extent, develop the software without having to work on the real hardware, which can be quite limiting (sensor issues, difficult to reproduce scenarios, battery...).
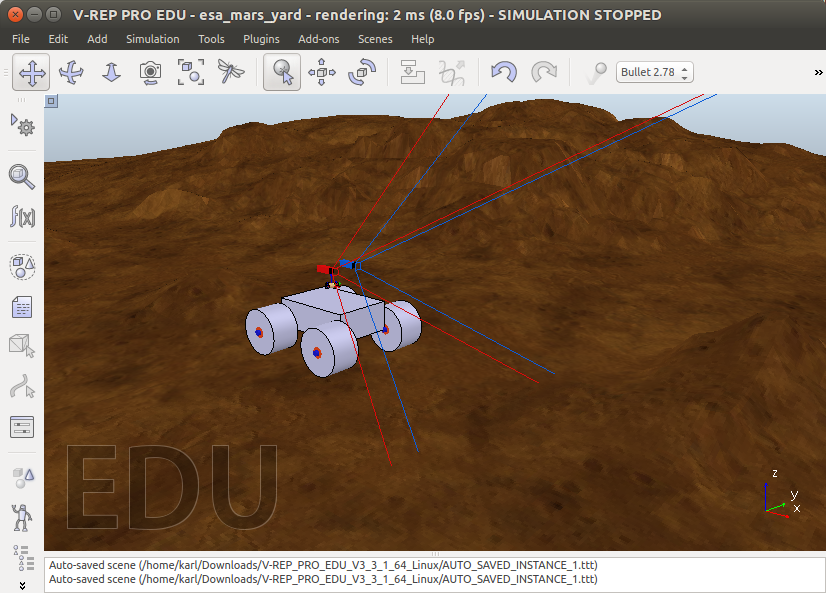
This is what it looks like on the simulation side in V-REP, I added a stereo camera because I can:
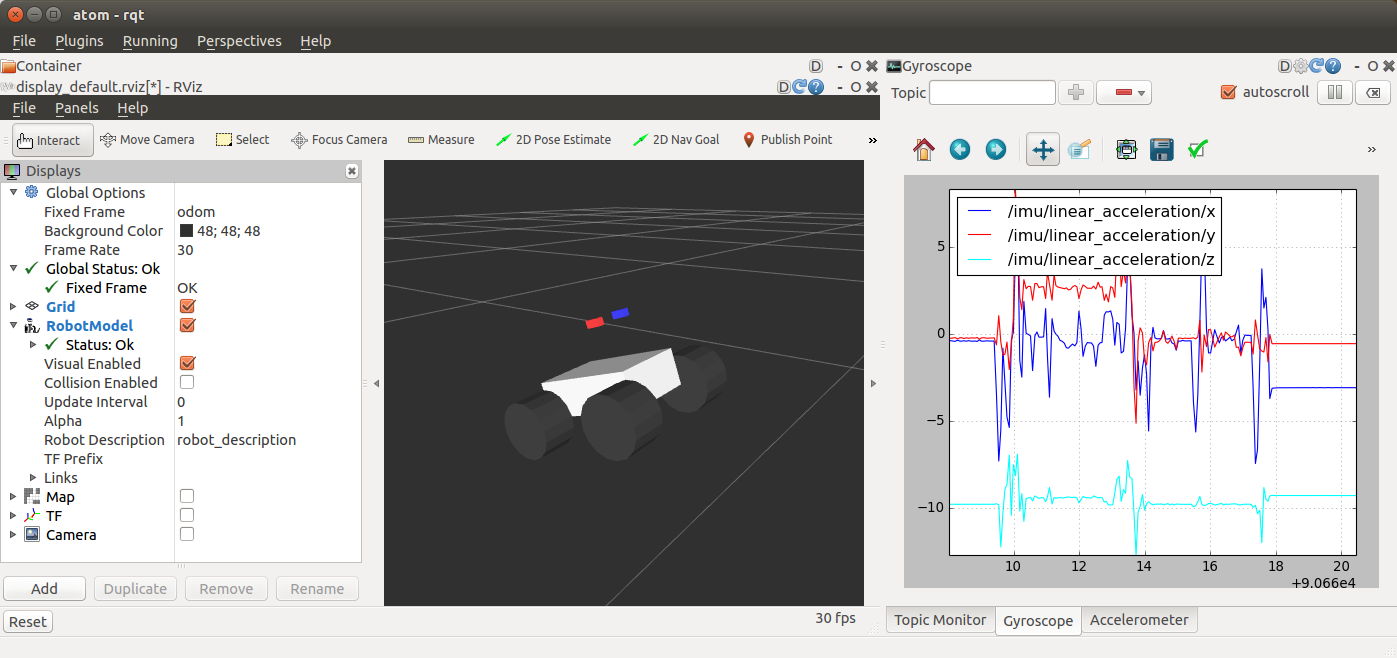
This is what the ground control looks like in ROS/RVIZ, it can receive the IMU, cameras and GPS data streams:
I can develop the control node and use the publicly available ROS nodes to do sensor fusion. In the end the ROS code developed in simulation should run the same way on the real rover, except that the sensor streams will come from real sensors instead of the simulated ones.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.