0%
0%
Software Phase Locked Loop
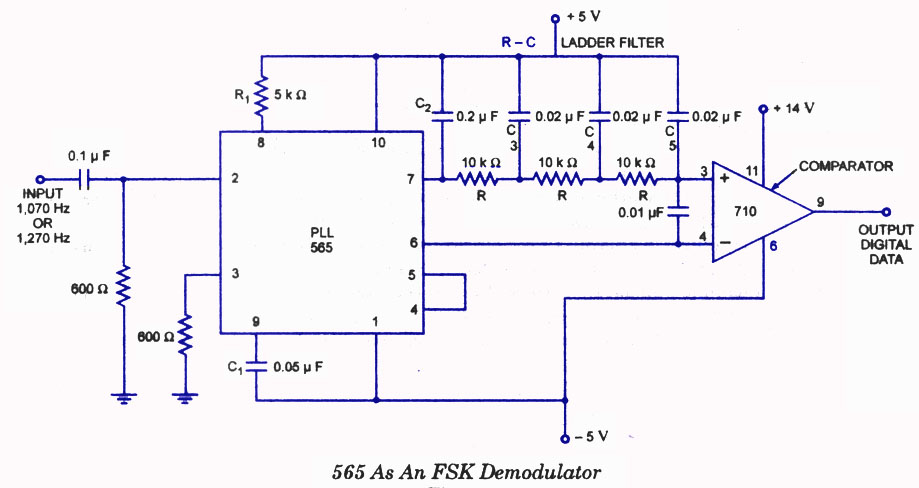
The 567 tone decoder is perhaps most famous Phase Locked Loop (PLL) chip.
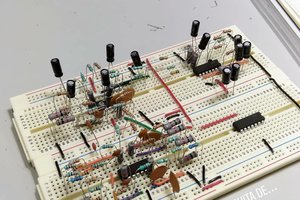
This project looks at an Arduino software PLL.
 agp.cooper
agp.cooperBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


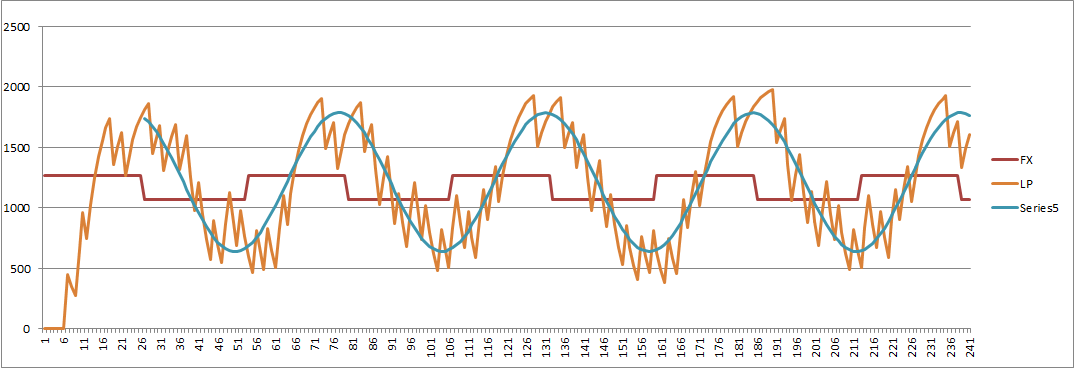
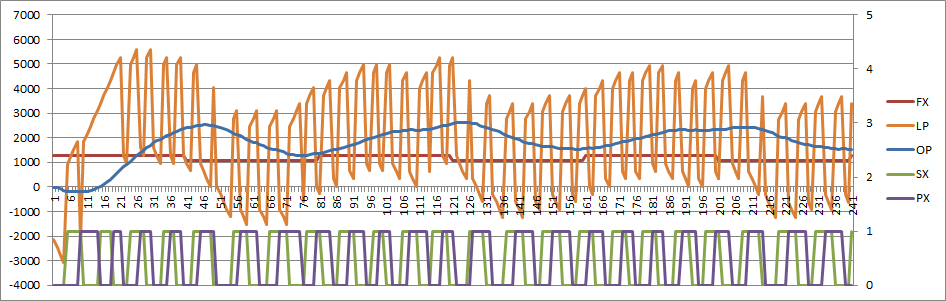
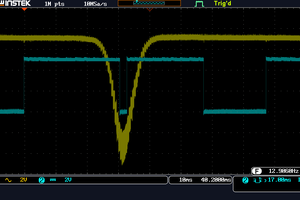
 What when wrong?
What when wrong?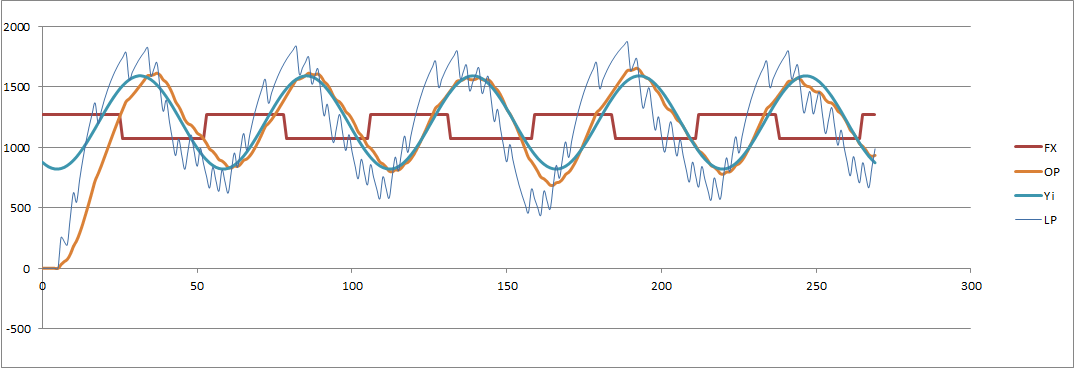

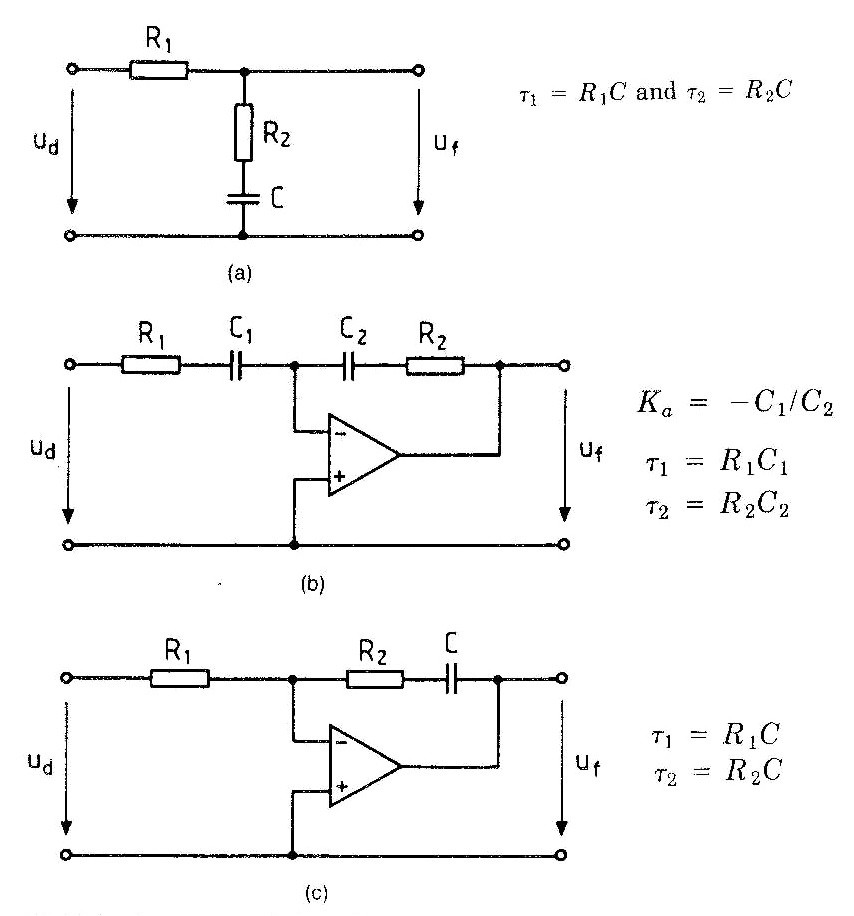

 This can be modelled as:
This can be modelled as: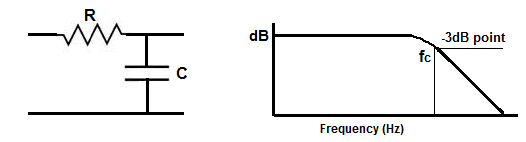 (source:
(source: 




 j
j
 Lilia Lobato
Lilia Lobato
The Software Phase Locked Loop is a brilliant innovation for ensuring synchronized signal processing and communication in tech systems. It’s impressive how it can adapt and maintain phase alignment dynamically. About Premier Offshore Software Development Firm, their expertise in integrating such advanced technologies into practical applications is unmatched. They truly elevate the game for tech solutions! custom software companies