 deʃhipu
deʃhipuToday I decided that the new PCB design was lying on the disk long enough, and that it's time to order it. But then, when I opened it in Fritzing, I decided to work on it a little bit more and add an important feature: battery protection.
You see, the batteries that Adafruit sells already come with the protection circuit, so the battery handling circuit on the feathers doesn't include it, but those batteries are too small for all those servos (and also kinda difficult to attach properly), so I'm instead using a bare 16340 battery (it's half of a 18650, if you were wondering). But that means no protection, and that means you can damage your batteries if you are forgetful. On the previous models I had software monitoring of the battery status, but that's not as reliable.
So I decided to go on and add a battery protection chip. Looking through my drawers, I found a HT3062E, which, judging by the Chinese datasheet, should allow up to 8A of current — that should be plenty for those tiny little servos. It comes in an ESPO8 package, so it was easy enough to add it to the PCB design:
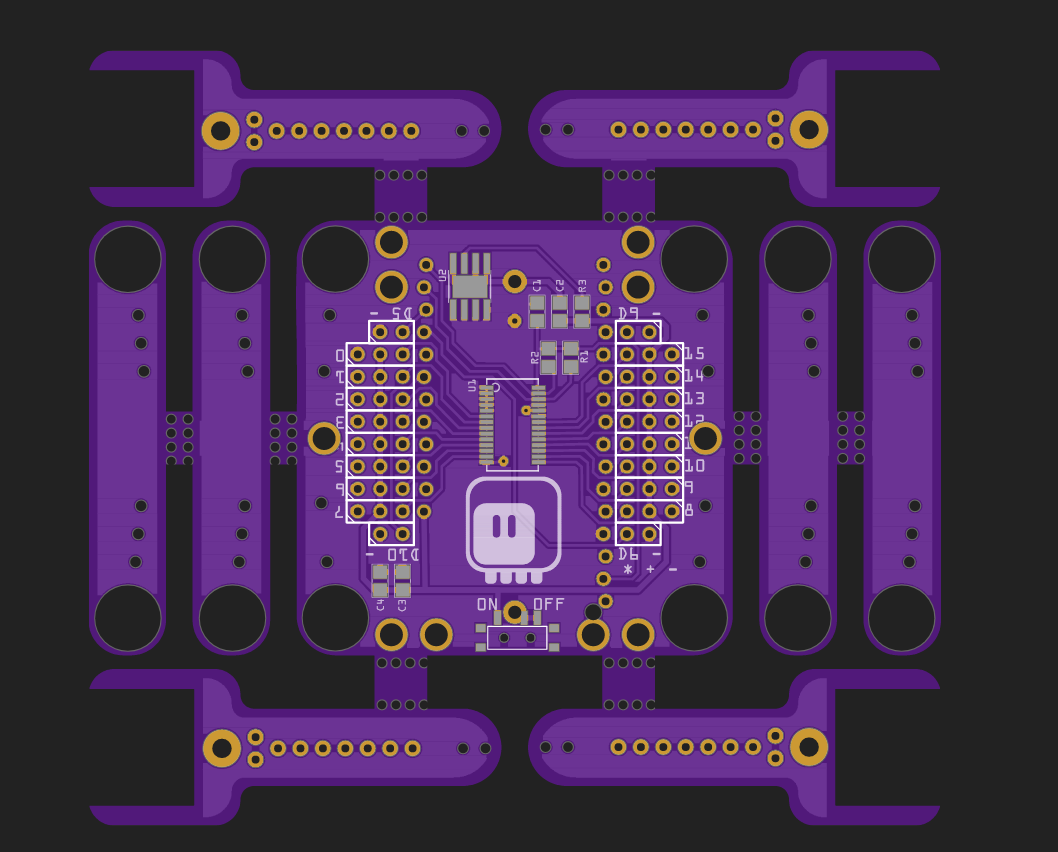
I had to remove the prototyping area at the front of the robot to make room for it (it had to be close to the minus side of the battery), but most Feathers have a prototyping area of their own on that side, so that shouldn't be too much of a problem.
I also made the pin header holes for the Feather staggered, so you should be able to save some height of the robot by plugging the board directly, without the need for female pin headers.
I ordered the boards from DirtyPCBs, because they are the only ones who don't care how many "designs" there are on a single PCB (most fabs will treat all the leg parts as separate designs and demand additional fees for them, for some reason).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.