 deʃhipu
deʃhipuIt took me a while to re-assemble, re-connect and re-calibrate all the legs with the new PCB, but today the robot is again standing on its own. I was a bit worried that the battery protection circuit would interfere with the servos drawing their share of the current, but it seems to be perfectly fine. I was putting off connecting the servos for a bit, because I didn't have the male pin headers soldered, and I was thinking that perhaps I should cut the servo wires and solder them directly to the underside of the PCB. But then I decided to leave them long for now, for easier hacking. I can always make a "tidy" version of this robot later.
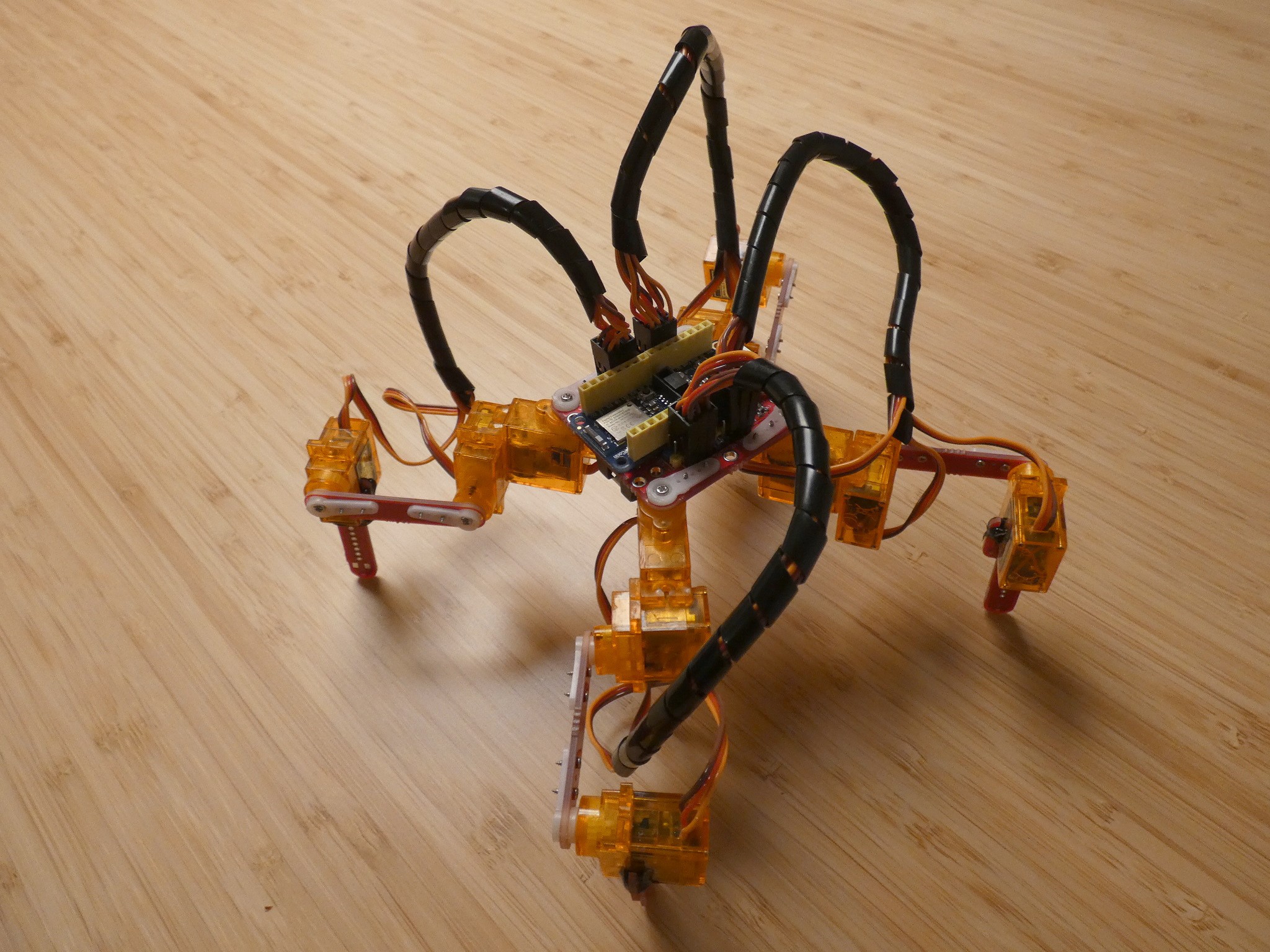
I have replaced the old HUZZAH feather with the new NRF52840 feather, because the CircuitPython is no longer supported on the ESP8266, and there is some very exciting progresss on bluetooth support on the NRF, and that would be perfect for controlling this robot. For now I just use the REPL over the USB cable, though, still using the old gait code — that's one of the parts that still needs work.
There are also still no switches at the ends of the legs — they are ordered, but Christmas is not the time of fast packages. At the very least they should let the robot avoid falling off the table.
As you can see, since I'm using stacking headers with all my feathers, there is room for adding modules on top of the robot. It could be a prototyping board with some sensors, or one of the other featherwings with displays, LEDs, speakers, etc. — it would even work very well with the #Gesture FeatherWing, controlled by gestures — if I ever get that to work.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.