 Peter McCloud
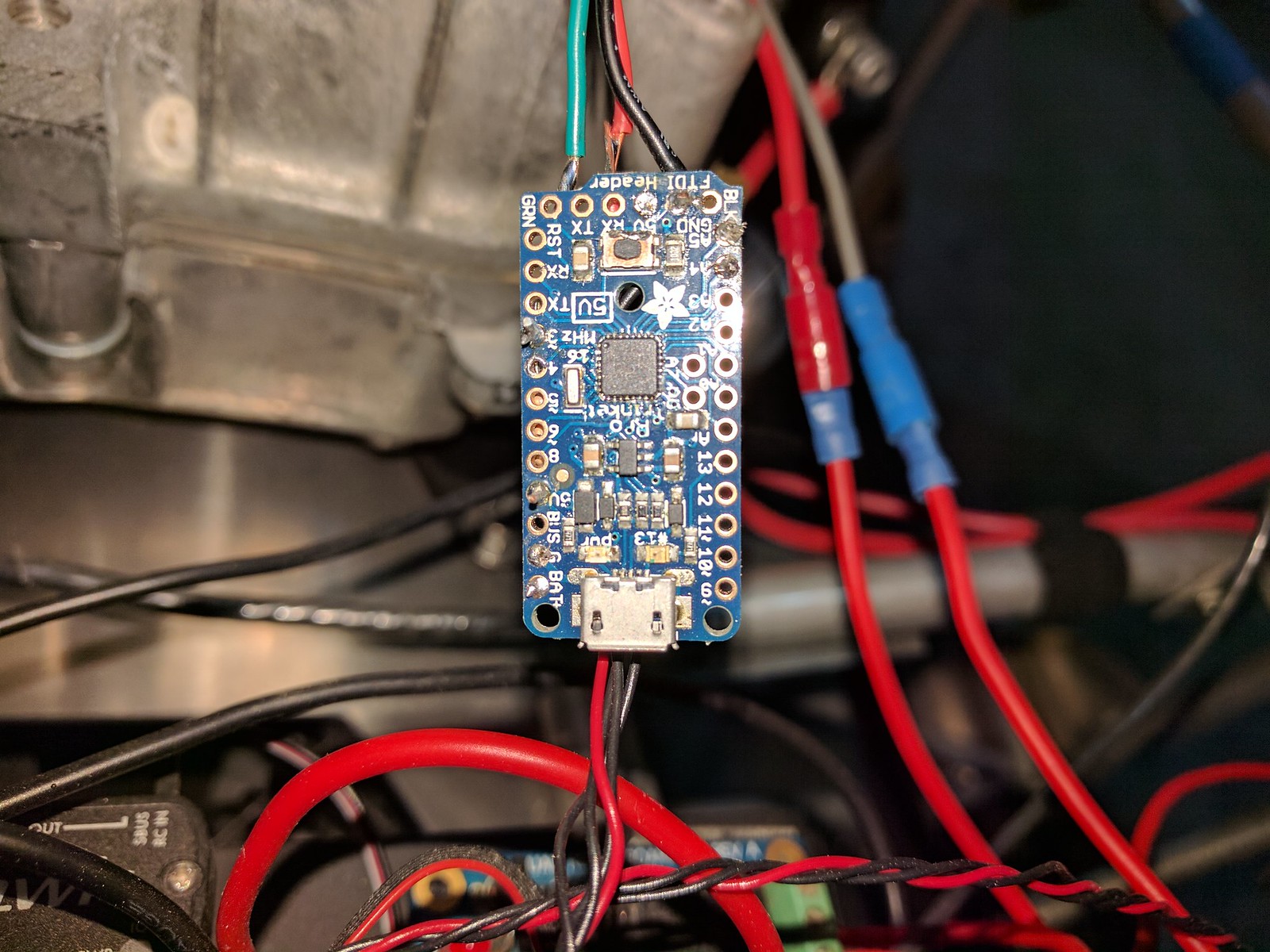
Peter McCloudThe Trinket Pro (arduino) hardware has been soldered together and has been installed on the vehicle. Below is the Trinket Pro connected to the Pixhawk I2C and the hall effect sensor. The arduino is powered from the 5V power provided by the Pixhawk I2C port.
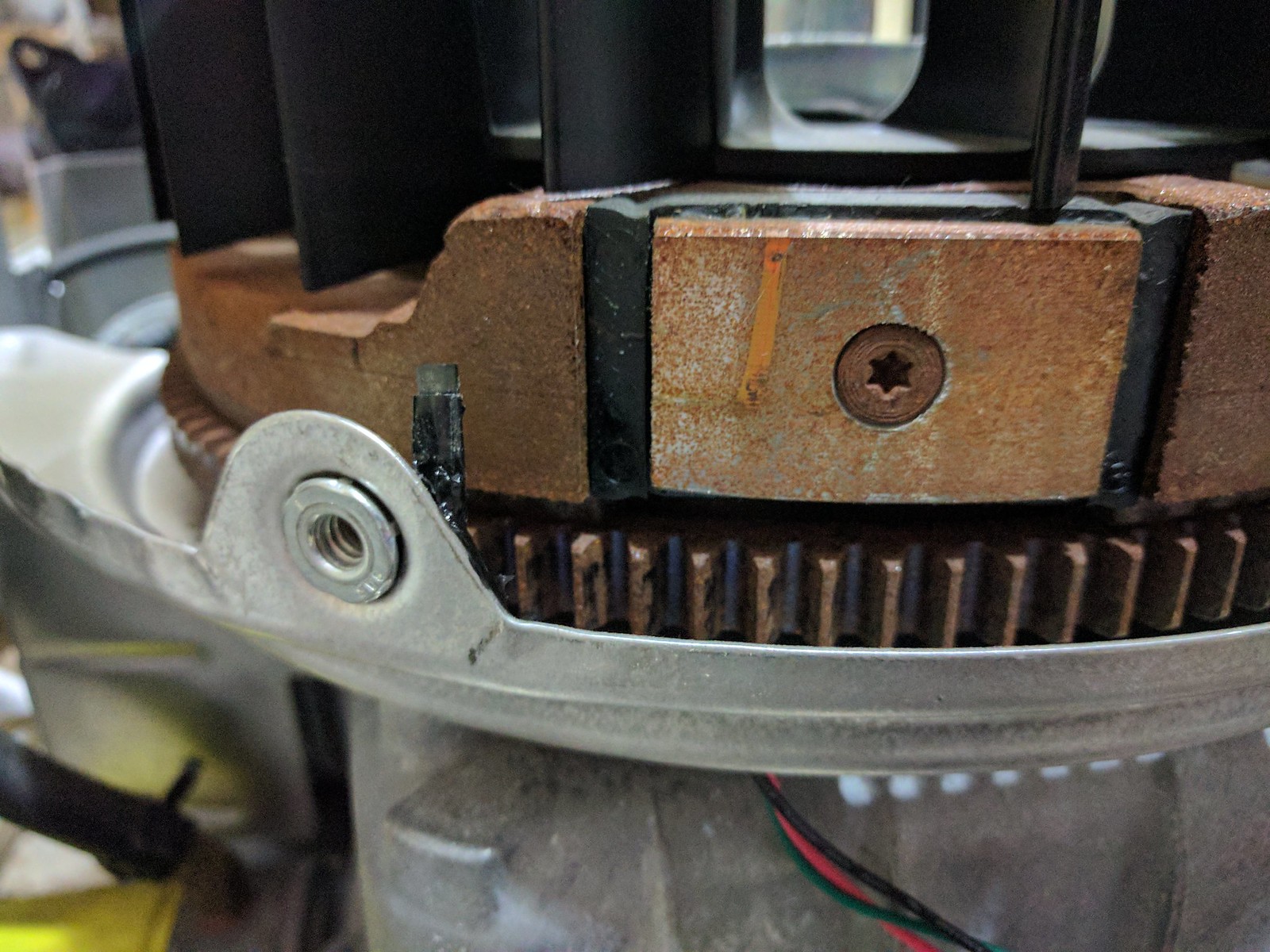
 The hall effect sensor is a uni-polar sensor meaning that the sensor only gets triggered by a specific orientation to a magnetic field. For this case the back of the sensor case has to be facing the flywheel magnet.
The hall effect sensor is a uni-polar sensor meaning that the sensor only gets triggered by a specific orientation to a magnetic field. For this case the back of the sensor case has to be facing the flywheel magnet.
 The sensor was also re-positioned to be level with the middle of the magnet.
The sensor was also re-positioned to be level with the middle of the magnet.
 A quick test of the setup was done to make sure the electronics work. The arduino was configured to blink the on-board LED when the magnet was detected. Then the engine was spun by hand to pass the magnet by the sensor. The arduino correctly detected the magnet and flashed the LED each time the magnet passed by.
A quick test of the setup was done to make sure the electronics work. The arduino was configured to blink the on-board LED when the magnet was detected. Then the engine was spun by hand to pass the magnet by the sensor. The arduino correctly detected the magnet and flashed the LED each time the magnet passed by.
The next step is to add the logic to the arduino to compute the frequency and then pass that to the Pixhawk via I2C.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.