 Antonio Regueira
Antonio RegueiraI select dc motor beacuse are cheap and i can control it well with a closed loop control sistem, with optical encoders.
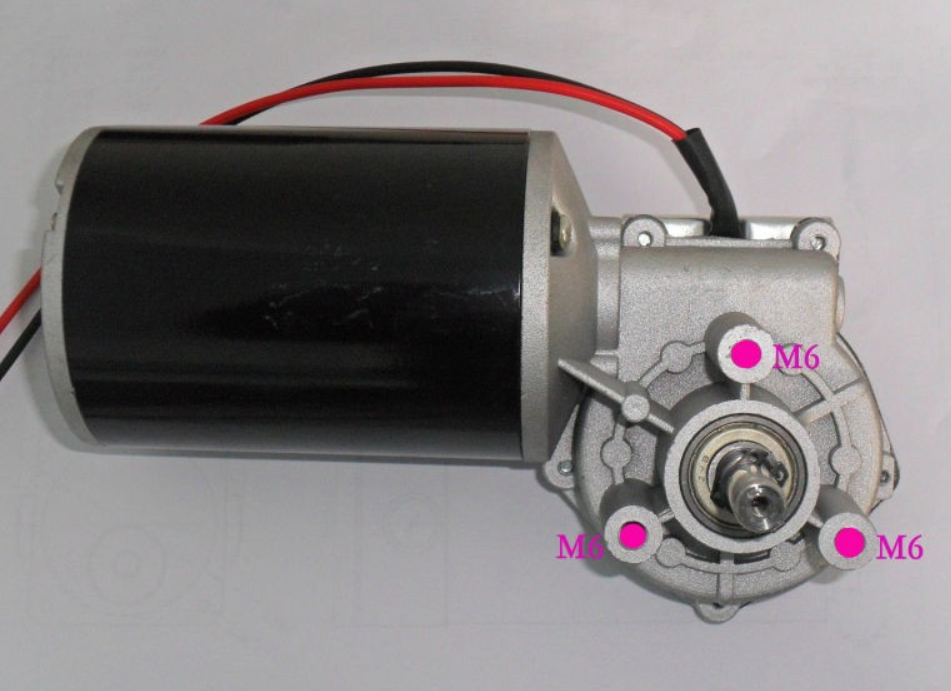
I look for a lot of motors and finally find this one:
This a 24 V DC motor 40 RPM and 120 W, with a nominal torque of 25 N*m, i built a gear reducer to 4 RPM, as i saw in mechanical engineering books the torque is proportional to velocity, so 40/4=10 and 10*25=250 N*m. 1 Kg*m is equal to 9.8N*m so 250/9.8=25.5Kg*m. This is a lot of torque!
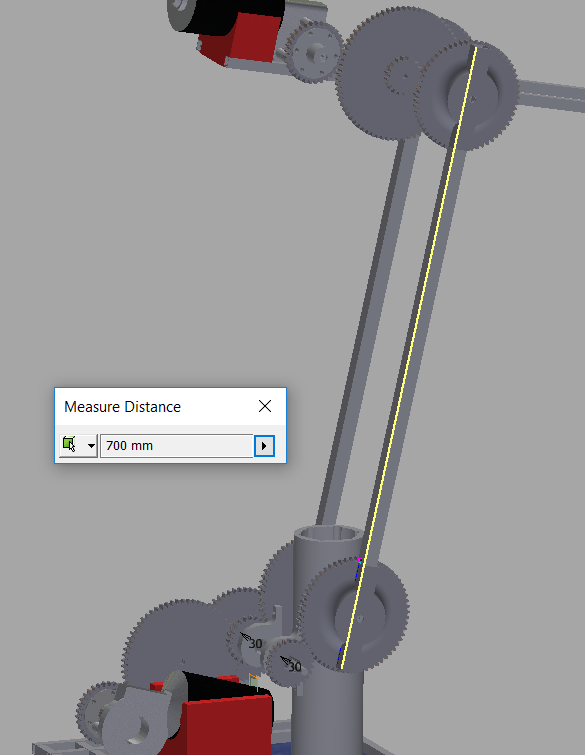
 The part form the shoulder to the elbow is 70 cm.
The part form the shoulder to the elbow is 70 cm.
This other part is about 62 cm plus the gripper(i didn't design it yet but more or less it will have about 20 cm).
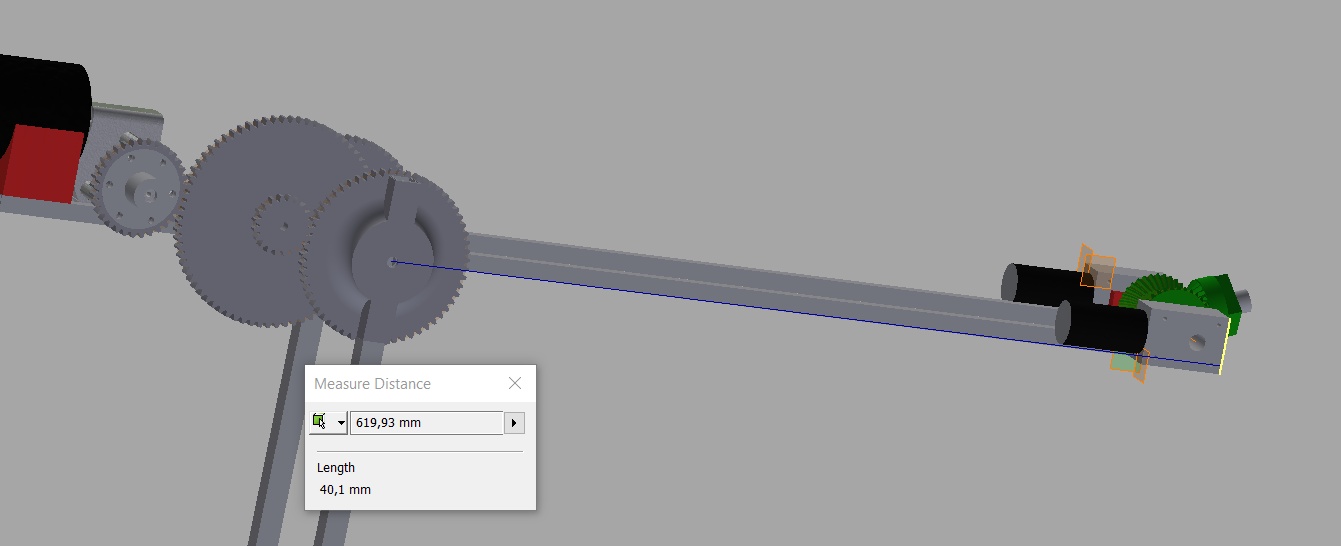 So i have 70+62+20=152cm. This is the maximus action radio of my robot arm.
So i have 70+62+20=152cm. This is the maximus action radio of my robot arm.
Then, if i have 25.5 Kg*m/1.5m=17Kg, i have to subtract the weight of the elbow motor and the wrist but i think i can pick up 5 Kg at the max lenght posible.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.