 Patrick Van Oosterwijck
Patrick Van OosterwijckI finally found the time to put the first prototype of the driver PCB together, and surprisingly, it actually works! \o/
Well, it didn't right away. It looks like the reflow of the PCB failed to connect one pin on the buck converter, the feedback pin. The buck converter is supposed to produce 5V power for the Pi from the 24VAC input. With the feedback connection missing, it instead produced 37V DC on the 5V output. Yikes! Am I glad I decided to test the output voltage before connecting it to a Pi! :)
Once that connection was fixed, the supply part worked. I'm actually very surprised that the 22 uF / 6.3V output capacitors survived the ordeal.
Then it was time to hook up a Pi and a load, and test whether the whole SPI driven shift register with zero cross latching scheme actually works. I followed the instructions in this post (except that the spidev library is actually in the repo now) and wrote a quick test that would turn the first output on and off every 100 ms:
while 1:
spi.xfer([0x00])
time.sleep(0.1)
spi.xfer([0x02])
time.sleep(0.1)And here is the result: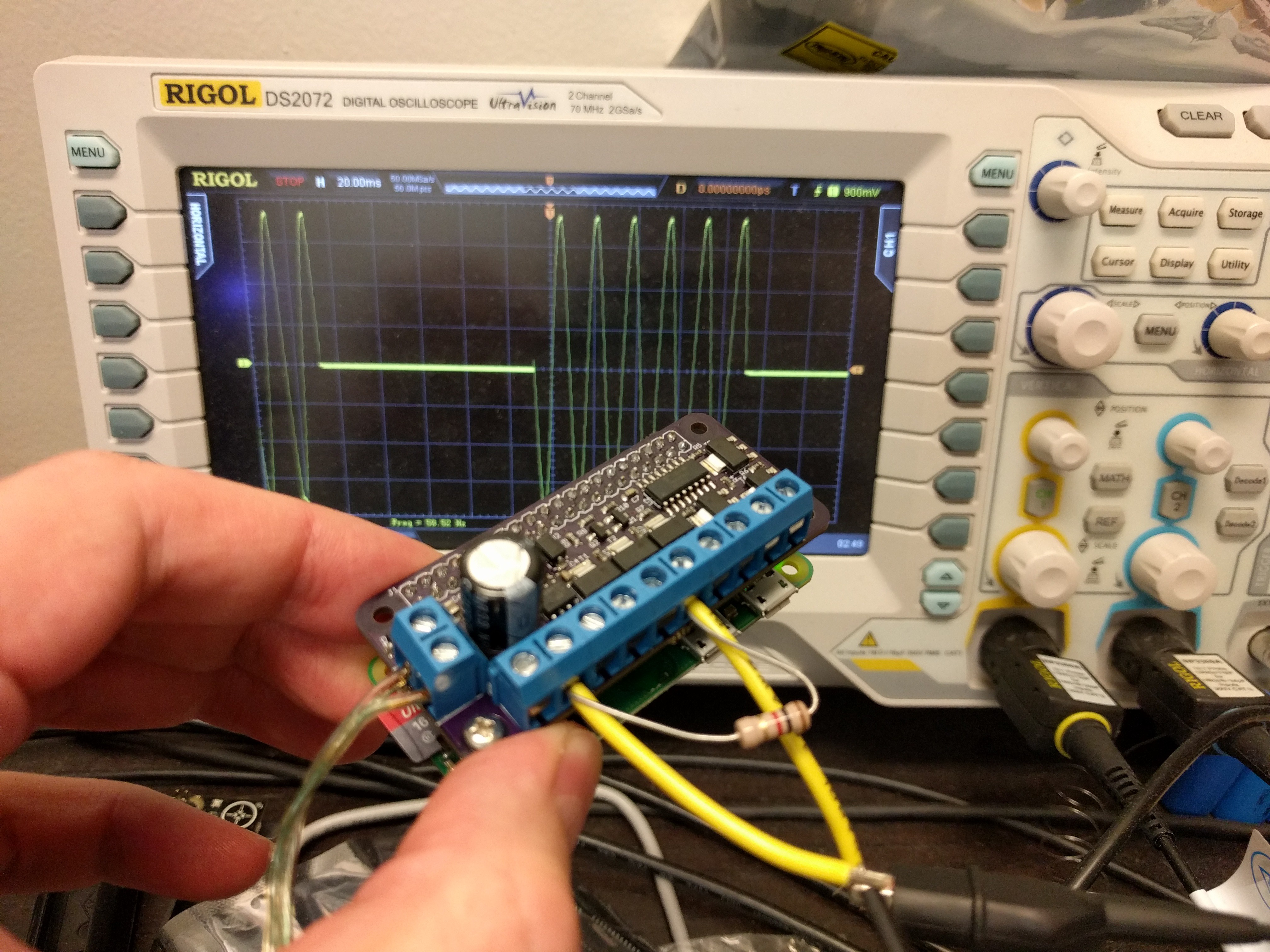
It's working beautifully! The load gets nicely switched at the zero crossings. :)
Next, it's time to hook up the pan/tilt stage and write a little control library.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.