The SRLS determine the position only based on an angle measurement. As further the robot is away as more demanding such a angle becomes. E.g. the robot is 5 meters apart from the SRLS one degree of error result in a 9cm positioning error. This isn’t a problem in respect of the theory as the angle under which reflection appears smaller gets as further the robot is away from the SRLS. But on the other hand it requires a high accurate measurement of the turning angle of the SRLS itself. The measurement of that angle is matter of the following considerations.
In the basic sketch the drive for the SRLS is thought to be internal, in order to keep the entire device compact. The necessary gears are difficult to get but easy to print with a 3D printer (gears with m = 1 are very simple to print). But a printed gear leads of a fairly big clearance. That’s so far no problem but leads to an arrangement in which the angle is measured direct on the body which have a fix connection to the laser. The following principles could be applied:
There are generally 3 principles come straight to my mind:

High accuracy rotary encoder, forked light barrier and hall element
For the magnetic and light measurement either magnets or slots can be made into the body of the SRLS. Let’s imagine a slot would be visible to detect with a width of 1mm and need to have a distance of 2mm to the next for appropriate 3D printing (the same would works with the Hall effect element if we can get 1mm magnets).
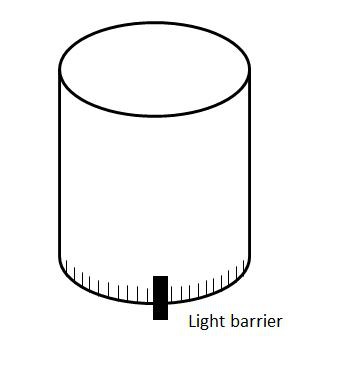
In this case the SRLS diameter would become 34cm (!).
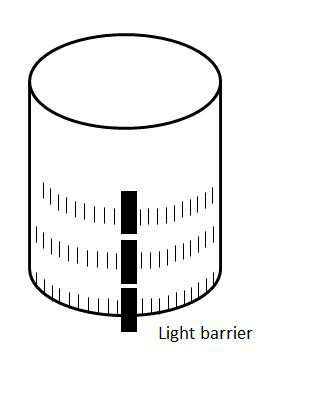
To void such a big diameter three rows with 1mm displaced slots could be made. This would lead to a diameter of about 11cm. This is visible but still too big for my propose.
A high accuracy 2 phase rotary encoder reaches easily a resolution of 1° Deg. but is also pretty expensive. The only way to make a fix connection to the body is to place it in the axis. According my the primary sketch is there the slip ring and to put it from the top is no alternative as a potential holder would block the laser beam at a certain place. Therefore this arrangement leaves only two alternatives: Either using a slip ring with a hole in the middle – An option which increase the costs enormous – or make the body not fully turn able and let it only swipe left and right.
The pretty precise solution is to take a timing belt and move an external wheel. The arrangement works pretty much without clearance but makes the SRLS more bulky.
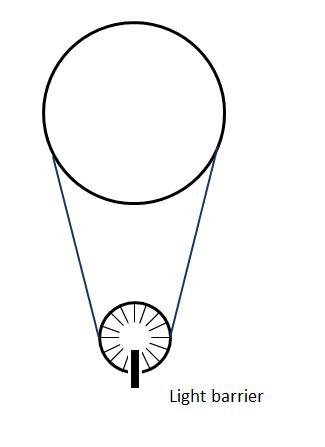
When we assume the body diameter of about 76 mm would it be possible to make 120 teeth with a 2mm pitch into the drum. For the other side a 12 teeth pulley is easy to get for a GT-2 belt. But however for a proper operation a minimum of 60 mm distance between the center of the body and wheel should be made and a pulley with minimum 20 teeth should be used (otherwise not enough teeth are in mesh).
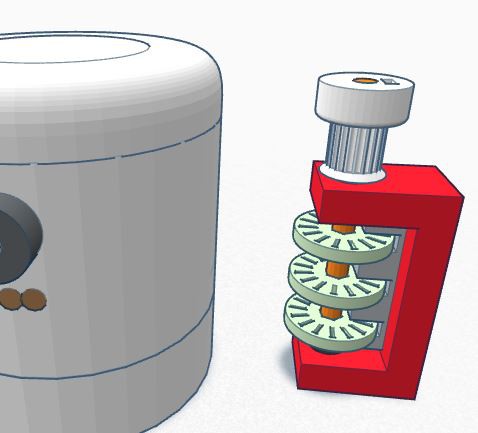
Considering all this a slotted disc (slots for the light barrier) would require having a diameter of 57,3mm for a resolution of 1° Deg. This is quite bulky and lead even to a > 65mm distance pulley body. But here as well three discs with 1mm displaced slots can be used. Using this we can realize the measurement with 20mm discs at this place or the use of 40mm discs which leads to a resolution of 0.5° Deg and a all in all visible arrangement.
Of course if this is the best solution, to put the drive external as well could be considered.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
I think that once you have even approximate position, you can use PLL to estimate the position between pulses from the time from the last pulse -- after all, the speed of the cylinder is not going to vary wildly, especially if it has some inertia.
Have you already thought about how you are going to communicate with the rotating part and power it? Slip rings are rather noisy. Wireless communication could be interesting, but you still need power.
Are you sure? yes | no