 kwan3217
kwan3217One of my long-term projects, or rather dreams, has been to record a trip on the Space Mountain roller coaster in Disneyland, California. Since it is in the dark, it is difficult to get a good idea of what the track path is. I designed a Rollercoasterometer to measure the track with inertial sensors.
The first version, made in 2009, was on a breadboard in a small plastic box. I carried this box in a backpack and successfully measured the forces, but I was not able to analyze the data to the point where I could measure the speed and position of the course. This breadboard version consisted of a Sparkfun Logomatic and several analog MEMS sensors. The Logomatic was used to digitize and record the measurements.
Science Marches On, and after a short while, the sensor manufacturers were packing more and more sensors into smaller and smaller packages. In 2012, the state of the art was to have the ADC built into the sensors, which then reported their measurements digitally over an I2C or SPI bus.
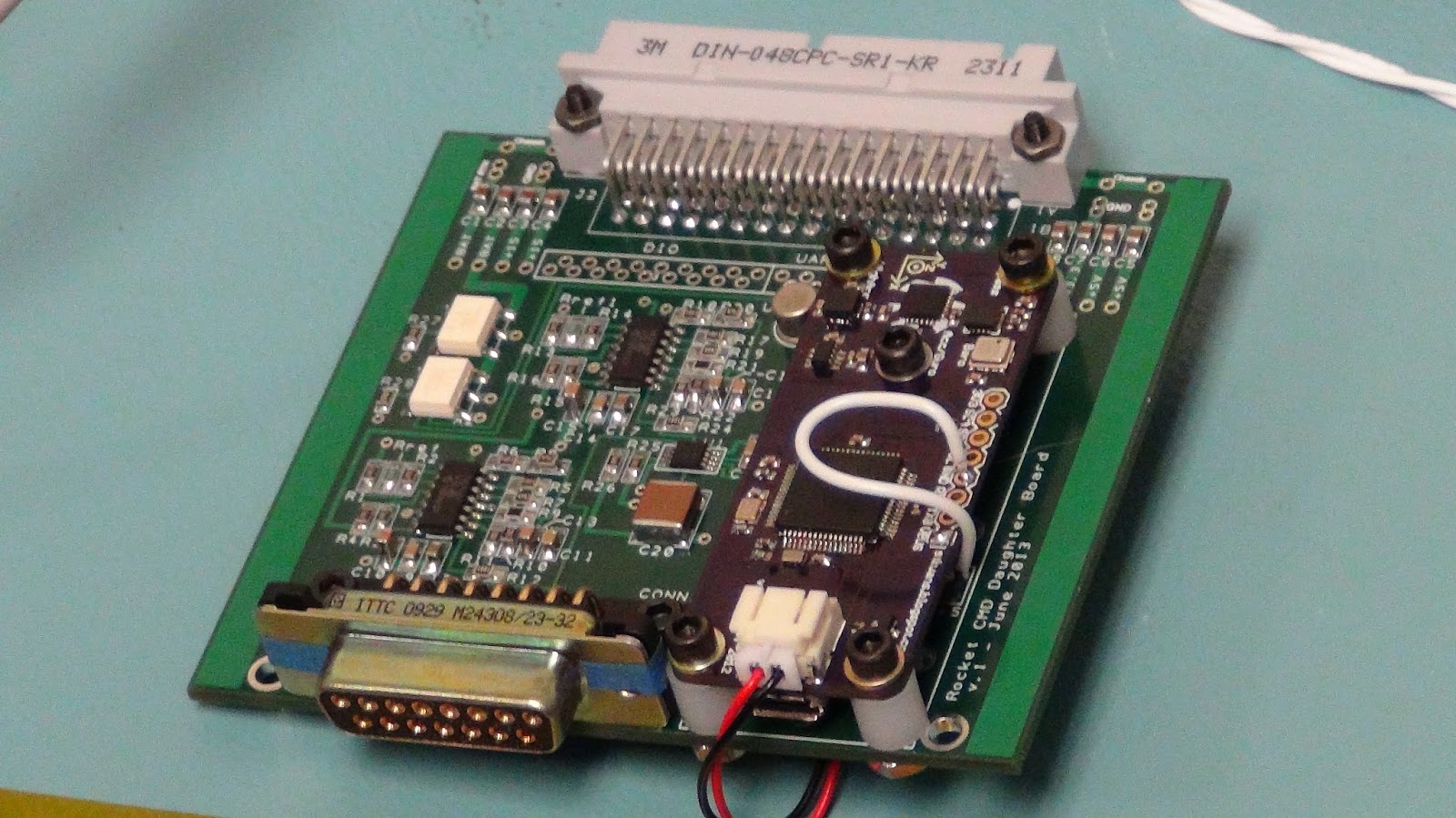
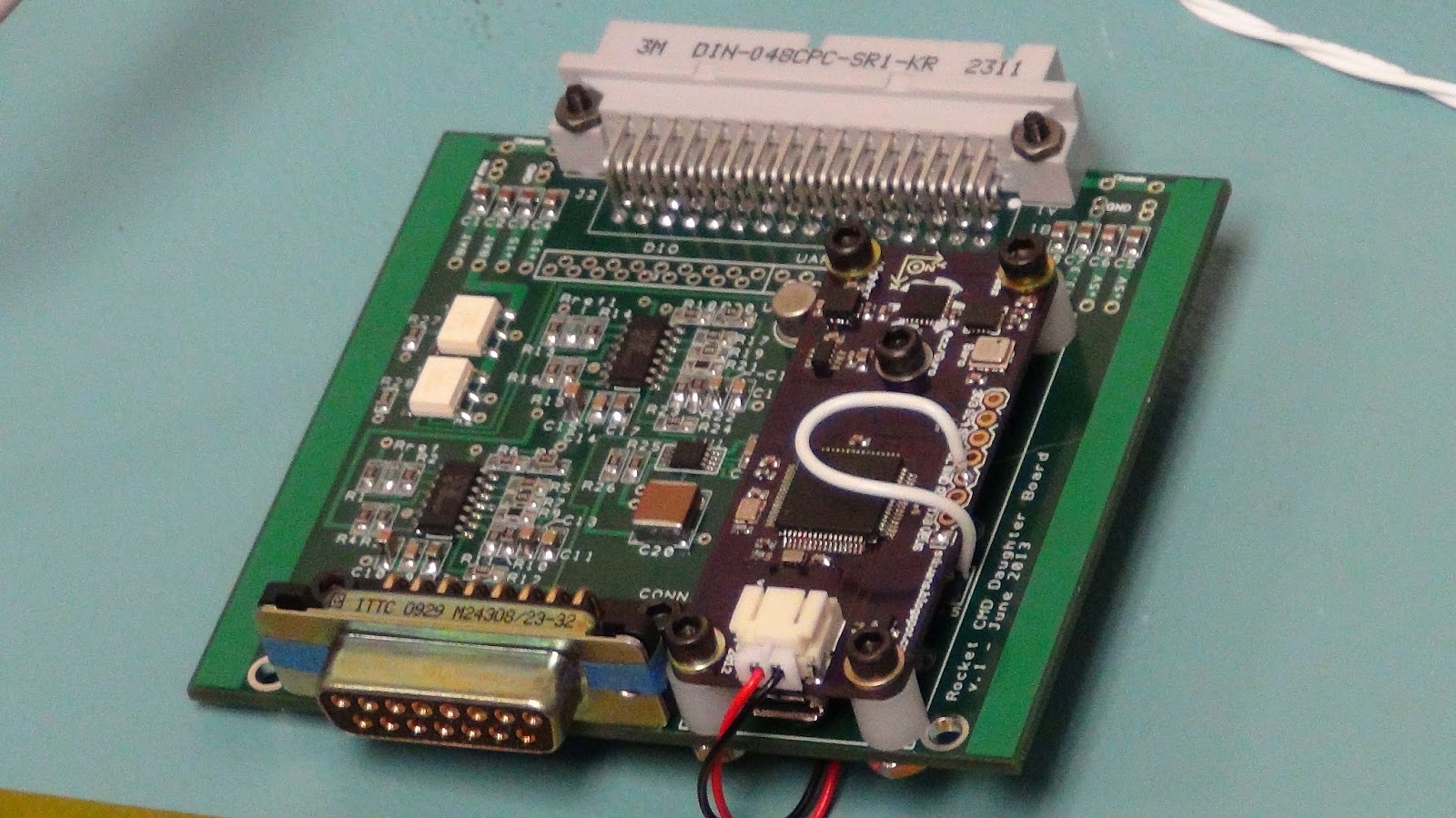
Since the Logomatic is open source hardware, I used it as a jumping-off point for a custom board with an ARM microcontroller, three MEMS sensors, and one magnetic sensor. The high-force accelerometer was analog, so I used an external I2C ADC to convert that measurement.
I designed the board to be small and light enough to fit into the payload compartment of a small model rocket. The final dimensions are 0.9 inches by about 2.4 inches, easily small enough to fit within a 1.1" diameter payload section. This is when it became a Rocketometer in addition to a Rollercoasterometer. This device is much smaller and easier to carry in a pocket, rather than a backpack.
My day job presented an opportunity. I am not a rocket scientist, but I work for some. They actually do science with rockets, both satellite and sounding rocket. I showed them my rollercoasterometer and one of them suggested that I let them fly the rocketometer version on their next flight.
I have worked in the space business since 2003, but one of the odd things about this business is that you can work on these things forever without ever actually seeing or touching them. I had never touched hardware that actually went into space. I changed that by building my own flight hardware. It's primary mission was to travel over 100km altitude, the official boundary of space, and be safely recovered. That was mostly up to the rocket itself. Once recovered, the part would be returned to me for analysis. The hardware itself would be retired and mounted on a plaque. The secondary mission was to function properly during the flight. If it didn't, the primary mission is still fulfilled, since I would have my trophy for my mantel.
As things turned out, the Rocketometer functioned perfectly, on roller coasters (including Space Mountain in Disney World, Florida), in a model rocket (twice) and in the sounding rocket. I finally got around to mounting the device this past Christmas.




 Walter Dunckel
Walter Dunckel
 Hugh Brown (Saint Aardvark the Carpeted)
Hugh Brown (Saint Aardvark the Carpeted)

I am looking for a sensor payload for my model rocket. Do you plan to share your project's pcb artwork, circuit design and calibration steps to the community?