In the design phase it's often useful to throw around hyperbole to weed out faulty assumptions and hone in on the true design criterion. One of the most important ones that we've noted is that the stroller aid in enabling exercise. Throwing in the hyperbolic possibility of, say, driving in tight circles, it becomes clear that just enabling forward motion is not enough.
While the placement of the our fixed wheel doesn't exactly allow tight circles, it does raise the possibility of having the stroller wander. Having to constantly grab the stroller, yank it back on course can lead to a focus of attention where the stroller will dart off to can make for a decrease in situational awareness and actually lead to a compromise in safety. Testing has borne this concern out.
So with the problem fleshed out, let's try to solve it.
We could:
- Have preprogrammed routes that the stroller autonomously follows
- Make the runner carry a hand-held steering joystick to drive
- Have the toddler steer
- Watch the runner's position behind the stroller and adjust accordingly
- Wait for Elon Musk to get that brain-computer interface working
- Follow some sort of inferred path
Each of these have disadvantages. Having to preprogram a route robs spontaneity and adds an additional hurdle to getting people outside. Carrying additional equipment can be troublesome for form. Watching the runner's position means they can never run alongside the stroller to help pass a juice box, check on a sleeping baby, or grab a quick drink.
Following a Path
Luckily, there is a path almost everywhere I've ever wanted to take a stroller, and it has clearly defined edges that make for reliable computer vision: the curb. Since running strollers are barely too wide and driveways cause bumps that are barely too large, running in the road becomes necessary. Almost all roads on which one can safely push a stroller feature a concrete (light-colored) curb and skirt adjoining asphalt (which is darker colored). In Phoenix, these concrete skirts often continue even through intersections to aid in drainage during the monsoon season.
This can be monitored by a Raspberry Pi with OpenCV and run through a PID loop to maintain a fixed distance from the curb. Because the goal is not to navigate a mall or amusement park, large deflections and tight turns are not required or desired. When the curb disappears (which, by design, we expect to happen regularly) the wheel can be quickly returned to the center position.
Obstacles
While the path is straightforward there are a few obstacles that need to be considered. Be it trash cans, parked cars, or other people, there will be situations where things get in our way. While it would be technically possible to autonomously steer around parked cars, it would require a turn into potential vehicle traffic. Safety, then, would require sensing traffic presence and speed, and then calculating how much time we have to get around.
Obstacle avoidance, then, will be handled by front-mounted distance sensors to alert the parent and communicate to the power control system. We can brake at the last moment if the runner doesn't react. Our goal is to honestly aid runners, rather than making a poor attempt to automate the entire activity.
Kits
By design, the system should not modify the commercial stroller heavily. If the original front linkage can be slid off and the new steering linkage slid on, building conversion kits becomes a real possibility.
Linkage
Most running strollers (sorry, Jogging Strollers) are equipped with a fixed front wheel. This is a reflection of the design goal of predictable forward motion as opposed to tight turns. However, it poses a challenge for steering.

The current design allows the front axle to be loosened and the slipped to adjust forward tracking. My steering linkage will replace the black plastic inserts with a 3D-printed screw mechanism to allow varying one length of the wheel support.
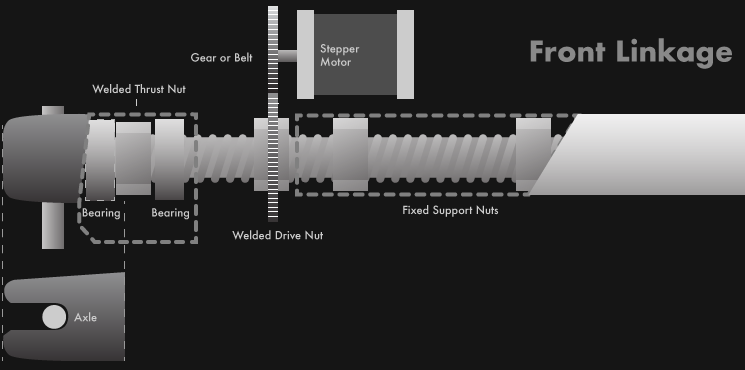
The stepper motor will either need to fixed to the wheel causing the screw to rotate, or fixed to the tube causing the nut to push and pull the screw. The fixed support nuts would then need to slip inside the tube. A final weld should be placed on the end of the screw to prevent a software bug from disassembling the stroller while in motion.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.