After the near-success of the slide-tube mechanism to convert the fixed-wheel stroller, I started searching for designs that could accommodate a larger turning angle. What I quickly found was that manufacturers don't really design their strollers with future autonomous control in mind. Ultimately I will need to design and build my own tube-frame.
In the interim, though, converting a swivel wheel design seemed the most practicable. These allow a manufacturer to market their stroller as a "jogging stroller" for "fit moms" when everyone involved knows that it'll *really* be used for walking around the mall.
The result is, unfortunately, terrible performance for its stated purpose. While the swivel wheel can be locked, the loose tolerances mean road camber, wind, and debris still affect the direction markedly. In practice it needs moderate steering corrections every 1-2 meters. Add in the weight and it's no great mystery why so many parents give up running when they have children.
The files below are designed specifically for a Baby Trend Expedition double stroller, but will almost certainly work for similar models, and are parametric to apply to different cases. The design accommodates a flat NEMA-17 profile stepper motor.
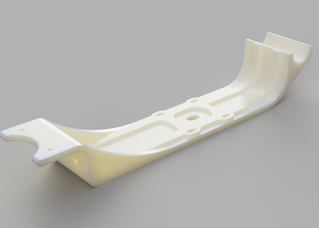 | Stepper Carrier Bracket |
 | Angle Drive Gear |
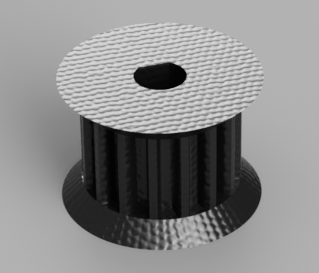 | Stepper Drive Gear |
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.