 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠Using the C94 M8P ublox eval kit which comprises a base station and rover. The base station remains static and is given plenty of time to get an accurate fix. The rover then communicates with the base station via a radio link and corrections are sent to the rover to get a more accurate fix as it moves around. So far I have got 10cm deviation in one hour, which is a pretty good starting point. Now trying to get the rover to talk to an Arduino due: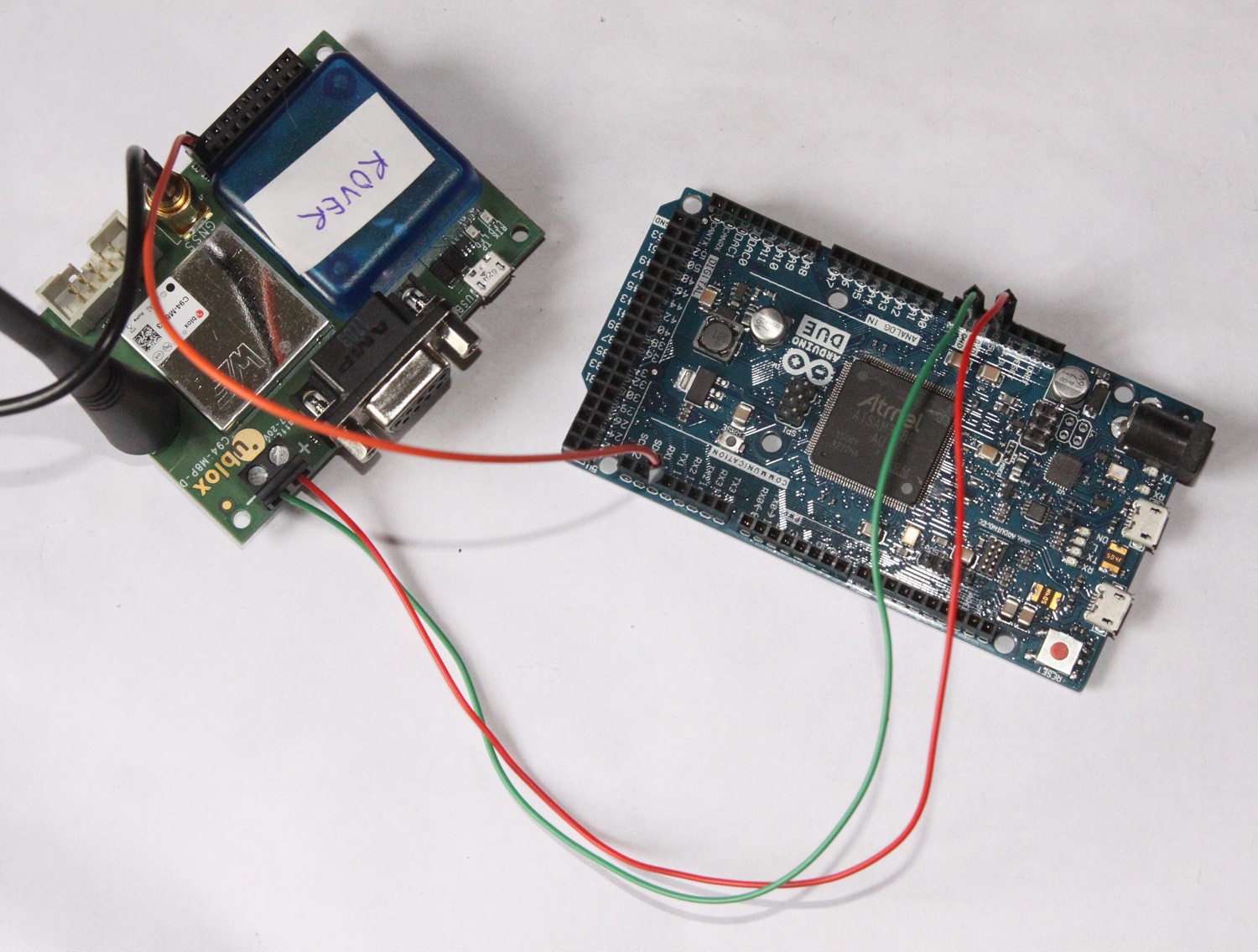 The Arduino Due Rx1 connects to pin 10 of the Ublox M8P on J8. The numbering on J8 is a bit weird - think 'snakes and ladders' rather than 'circular'. Eventually I got some data received using this simple code:
The Arduino Due Rx1 connects to pin 10 of the Ublox M8P on J8. The numbering on J8 is a bit weird - think 'snakes and ladders' rather than 'circular'. Eventually I got some data received using this simple code:
void setup() {
// initialize both serial ports:
Serial.begin(9600);
Serial1.begin(9600);
Serial.println("Ready to test");
}
void loop() {
// read from port 1, send to port 0:
if (Serial1.available()) {
int inByte = Serial1.read();
Serial.write(inByte);
}
}The code prints out everything received on Tx1 to Rx0 and I got this slightly garbled result: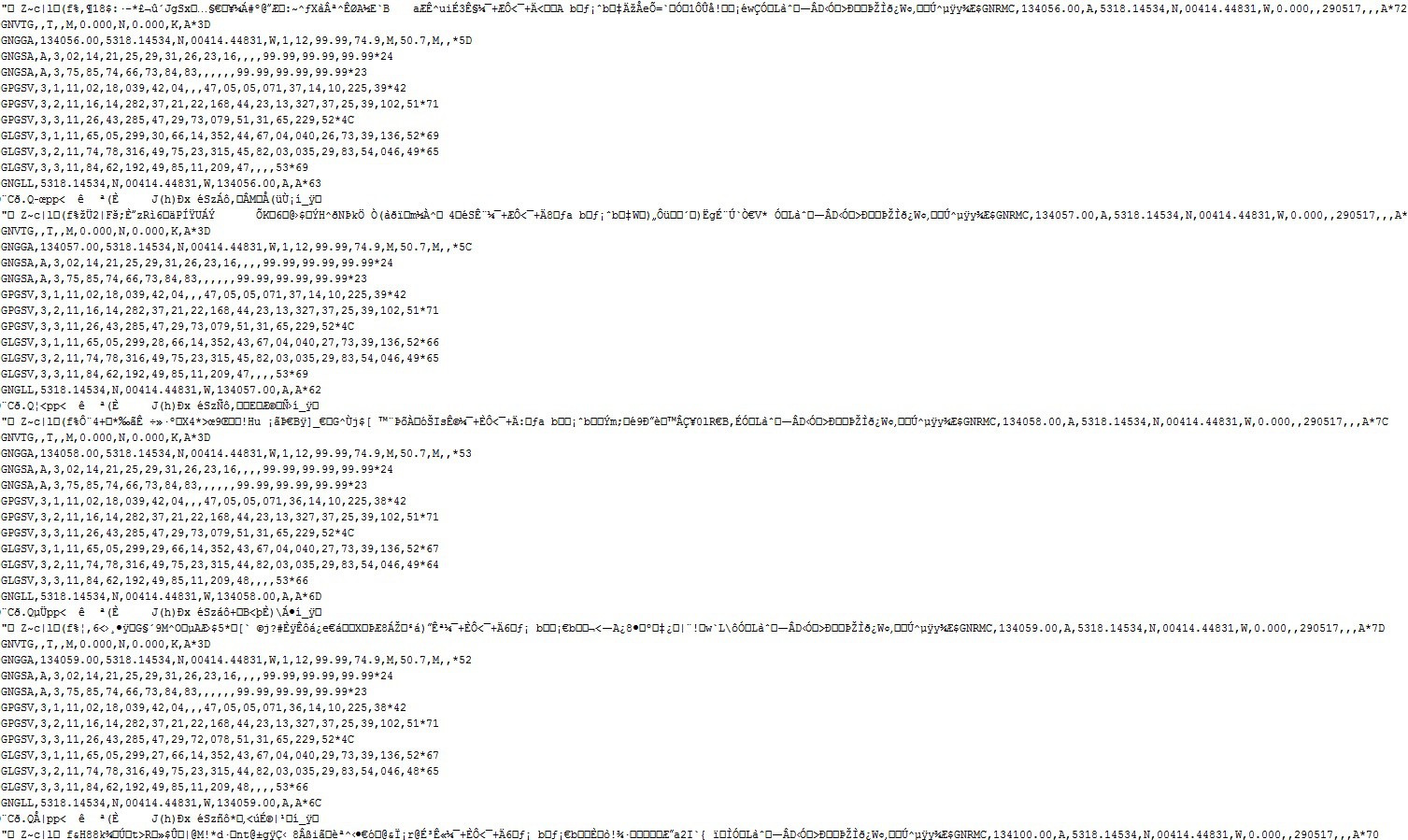 Looks like the radio transmit interferes with some of the data, but I'm guessing I can filter this out through character analysis in strings.
Looks like the radio transmit interferes with some of the data, but I'm guessing I can filter this out through character analysis in strings.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.