 Mark Mullin
Mark MullinI may have been quiet here, but much has been going on in the github side of the house. Refining my previous claims, the second generation will consist of an as yet undetermined number of stereo camera pairs on elephant trunks. Before worrying about grander things, one needs a working stereo camera.
The patient is still on the table, wires dangle out everywhere, and organs keep getting swapped in and out. That said, here's a zoomed picture of the systems current ability to rectify a stereo image pair in order to do successful depth measurement.
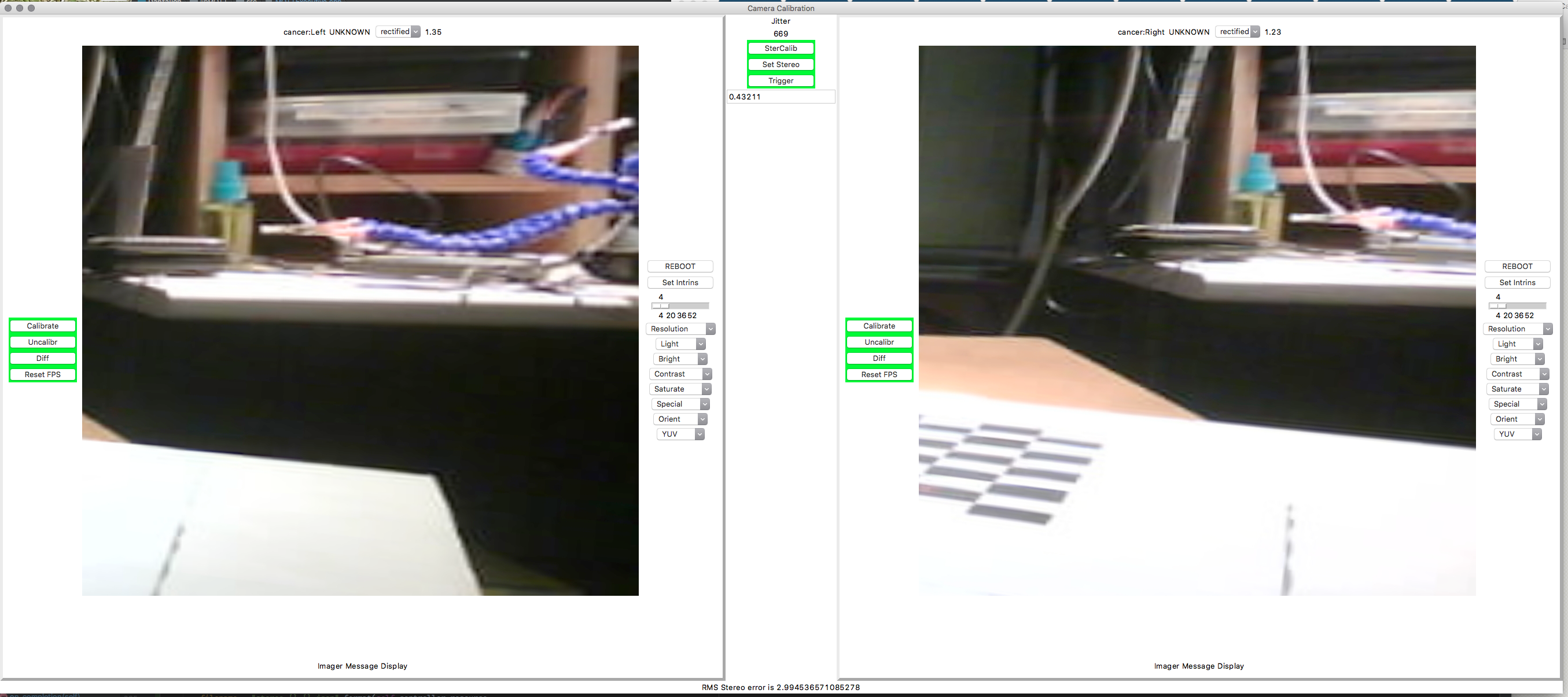
This shows a high delta visual region AFTER (mostly) successful stereo rectification (sliding the images around so everything aligns just right). This is the sweet spot for where it's got the strongest depth measurement abilities, which it does by measuring the horizontal offset between equivalent points. These images have been aligned vertically to allow for measurement of distance by measuring the horizontal angle between equivalent elements of the image.
In short, with the depth map that can be derived from these pictures, this is how you keep your robot from bumping into things. :-)
All the unique code to do this is on, or will be on github soon. I'm working on trying to document the plethora of library and external system dependencies, as well as just making an OS image available in case I missed anything. None of this is a secret, much that is good comes from others, so if I can help light the way, it's in my interests too.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.