Mika Heikkinen
Mika Heikkinen-
Feeder
05/25/2017 at 11:02 • 0 comments![]()
Gear now uses 1.2mm x 20mm nails. Just flat head is cut off with side cutters. With correct size of hole, pins are easy to push in into correct depth. Little screw locking is applied into hole beforehand. Ordered some HAL sensors from TI. When arrives, try to experiment position sensing with those.
-
Smoothieboard arrived
05/24/2017 at 20:40 • 0 commentsSmoothieboiard arrived. Also added separate 3.5A stepper drivers for x & y axles.
Works very well with openpnp after some configuration wonders (creek alphapeths etc).
Also doing now 32 microstepping with full power. Steppers run very Smoothly.
Some calibration is still needed, but generally looks promising.
On clip brdMaker is jogging(0.1mm) on 0.4mm pitch bga pins. Those "big" pads are 0402 what are actually not so big at all.
0.4mm bga is very close to the "state of the art" in pcb technology. Hopefully brdmaker will be placing those soon.
-
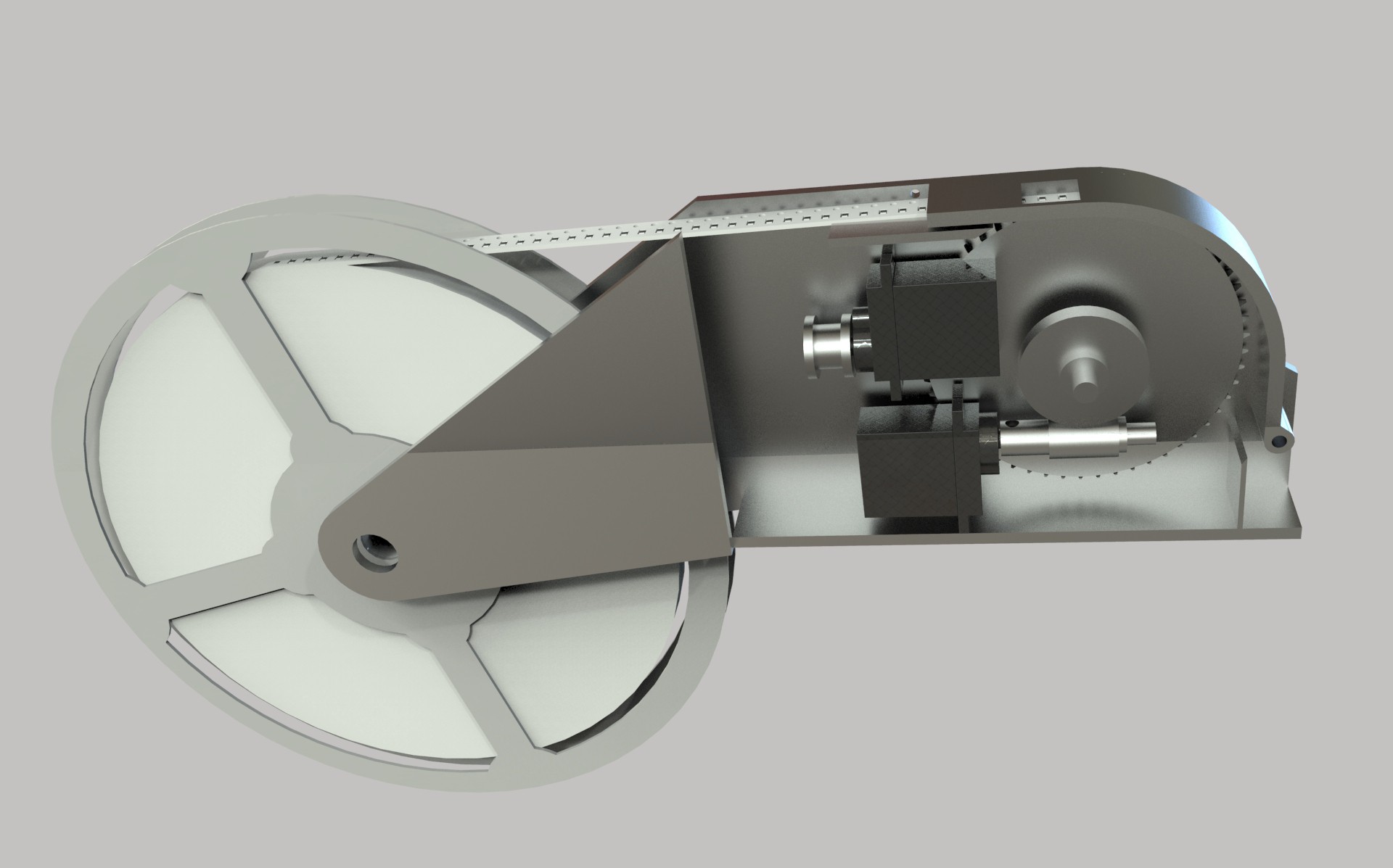
Motor feeders
05/22/2017 at 14:56 • 0 commentsPrinted prototype now feeds and peels. Some work is still needed to redefine tape route. Original plan was to guide it downwards, now i would like to guide it backward, under the reel.
Also sensors for position tracking are needed and of course controller.
Current state of design with side opened to see ultra simple interior.
Hit "follow" if want to see more "work in progress" posts.
![]()
-
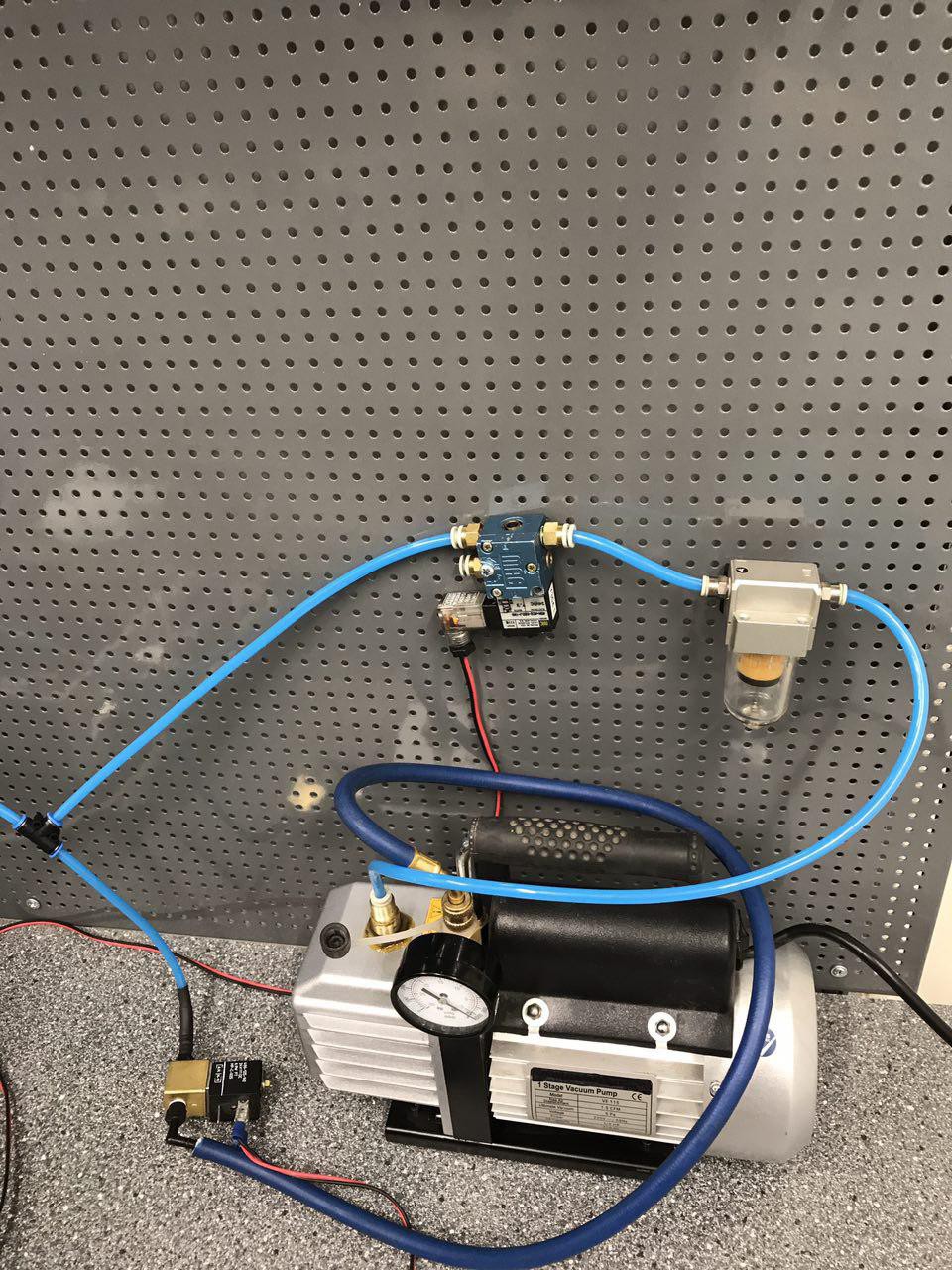
Life in the vacuum
05/18/2017 at 20:14 • 0 commentsOne of the basic functions of the PNP is ability to keep component in the nozzle.
This is done by the vacuum.
I have one real BGA station and nozzle vacuum is done there with the venturi effect.
Venturi effect forms vacuum from compressed air. It works very well, but consumes HUGE amounts of compressed air. As an example 2kW compressor runs almost full time. That's definitely the best choice is you are having free and silent source of compressed air. I don't like that noise so will look something else.
Another option is to use vacuum pump. There are numerous handy looking small dc pumps out there and many are using those for PNP.
I tried 3 types of dc pumps. Common to all of those was that those are terrible source of RF interference.
Some of those were so bad that i lost image from hdmi display completely. After switching back to VGA there was at least some sort of noisy image.
After placing pump into RF shielded box and added noise filtering into power it was possible to operate on the same desk. Well you can understand this well when you look that blue spark glowing from the burning carbon brushes.
Other worry with those small DC pumps was that those are not meant to run long times continuously.
Ok, we are not going running continuously, or are we.. Some people with more experience recommend that you should run continuously because motor may not start as fast as expected.
I decided to try something bit heavier this time.. AC vacuum pump meant for generating vacuum into air conditioning tubes. Those are meant to run hours at one go.
Seem to run very nicely and quite silently and generates good source of vacuum.
Pump problem solved, but new worries came around..0402 parts just have so small mass that those get stuck into nozzle.. There have to be some magnetic or surface forces that keep component in the nozzle event the vacuum is completely disappeared. It may not be the problem if the component is pushed into paste, but you can't imagine any discard functionality if parts keep hanging on nozzle.
First thought was that component now needs air blow from nozzle. Of course i could use compressed air there but there is that vacuum pump already running there.
Pumps exhaust happens from the oil cap. So after making proper adapter into oil cap, there was source compressed air. I added filter if there is plenty oil mist in the air.
Then another solenoid connects now compressed air into nozzle when needed.
All the valves does not work with the vacuum, so check this before buying any.,
Now part stays very well in nozzle, and drop very fast when pressure is applied.
HackADay: Tool holder wall is very handy when doing pneumatic breadboarding
![]()
-
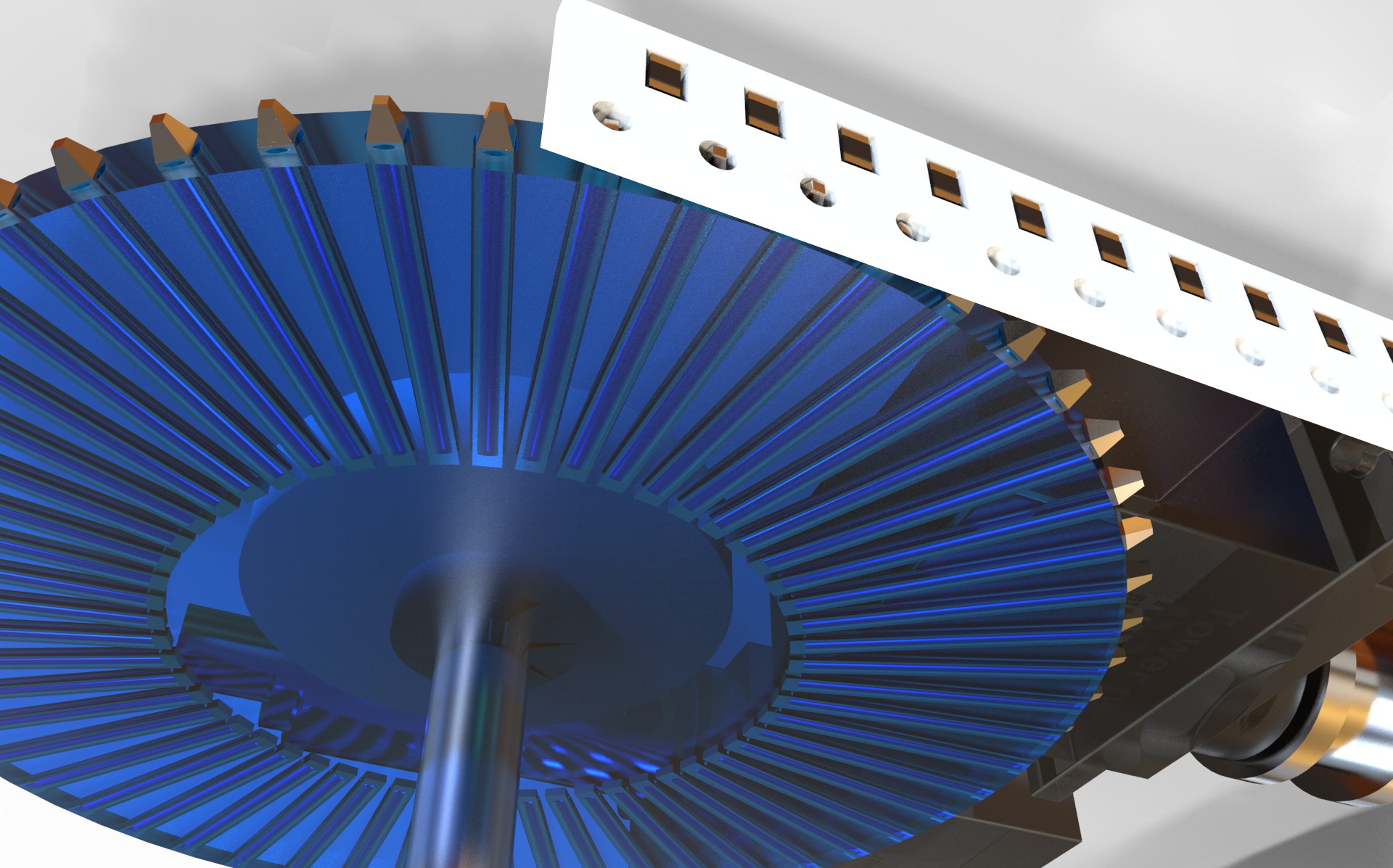
Reinventing wheel
05/17/2017 at 19:12 • 0 comments![]()
Some experiments for motor feeder. Below is PLA printed feeder gear with steel pins hammered in. Kind of composite material :) Pins still needs some grinding.
Plan is to use small hobby servo with worm wheel to drive the feeder.
-
More about nozzle feeding
05/17/2017 at 06:34 • 0 commentsbrdMaker doing nozzle feeding. Doing visual location of component in between. Some parts were popped already when removing the tape manually. Parts are 0402 and pops out VERY easy.
Feeder tray is one of those cheap ones meant for manual placing. There is plenty of play in every direction. After placing correct height used strip under the real strip, strip does not play anymore in height direction. Lets see if the side play is still too much.
Tape peeling and handling the used strip needs now some fresh ideas.
-
Drag feeding with nozzle
05/16/2017 at 19:47 • 0 commentsNormally when there is talk about drag feeders, it is expected you to have pin actuator for dragging.
Normally this pin actuator is controlled by solenoid. But control of solenoid is very insensitive and when solenoid reach it's end it causes quite shock that can throw component from whole strip away,
So why not to try drag strip with the nozzle?
With nozzle you can adjust height so that you do not hit the strip of bottom at all. Motion controller slows down motion before touching the strip.
Juki 501 nozzle outer dimension is around 1mm. Size of the strip hole is 1,5mm, so this should be just fine.
OpenPNP documentation does not say anything about nozzle actuators.
After some experimentation found out that you can specify same offset for head actuator than you have on your head. Ok, now OpenPnp know where your actuator is located, but how to get it actuating?
First you have to experiment with jogging what is correct head height for dragging the strip.
With current setting strip was dragging nice with Z height of 10mm.
Gcode driver under actuator have section ACTUATE_BOOLEAN_COMMAND
Following line do the job: G0 {True:Z10}{False:Z0}
Then some tuning with drag settings.. BackOff of 0.2mm was fine to prevent parts to fly away when lifting nozzle. Drag distance is bit more than 4mm because the is some slack around nozzle in hole.
Wow, works just great. OpenPnp is just awesome.
-
Picking first components
05/15/2017 at 12:02 • 0 commentsbrdMaker successfully picked it's first components!!
Now using TinyG as motor controller.
TinyG has only 4 motor channels and brdmaker needs least 5. Also there is need to interface pressure sensors, more IO is needed for feeders, etc
Also the way how TinyG reports completion of G-codes is different than OpenPnp expects and is bit difficult to parse those out.
Smoothie is on the way here and lets hope that things are better there.
Meanwhile lets do some tests with drag feeding.