Since using a beam antenna wasn't as accurate as I hoped for direction finding (see previous log) I was looking for other alternatives, so I tried using the phase difference between two antennas, sometimes named tdoa. This method basically uses the doppler effect, but instead of rotating the antenna physically, the antenna is rotated virtually, by switching between one or more antennas. The idea is
- when one antenna is closer to the transmitter, there is an audible glitch in the signal
- when the transmitter is equidistant to the antennas, there is no change in the signal
My phase difference receiver is using two antennas. Switching between two Lambda/2 antennas is done using RF Pin Diodes:
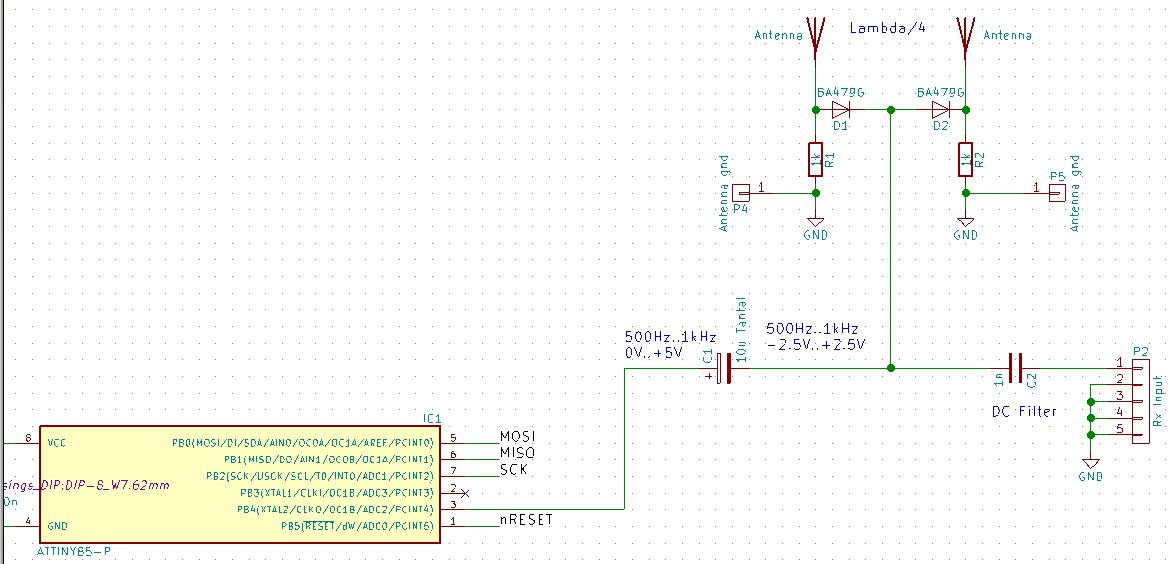
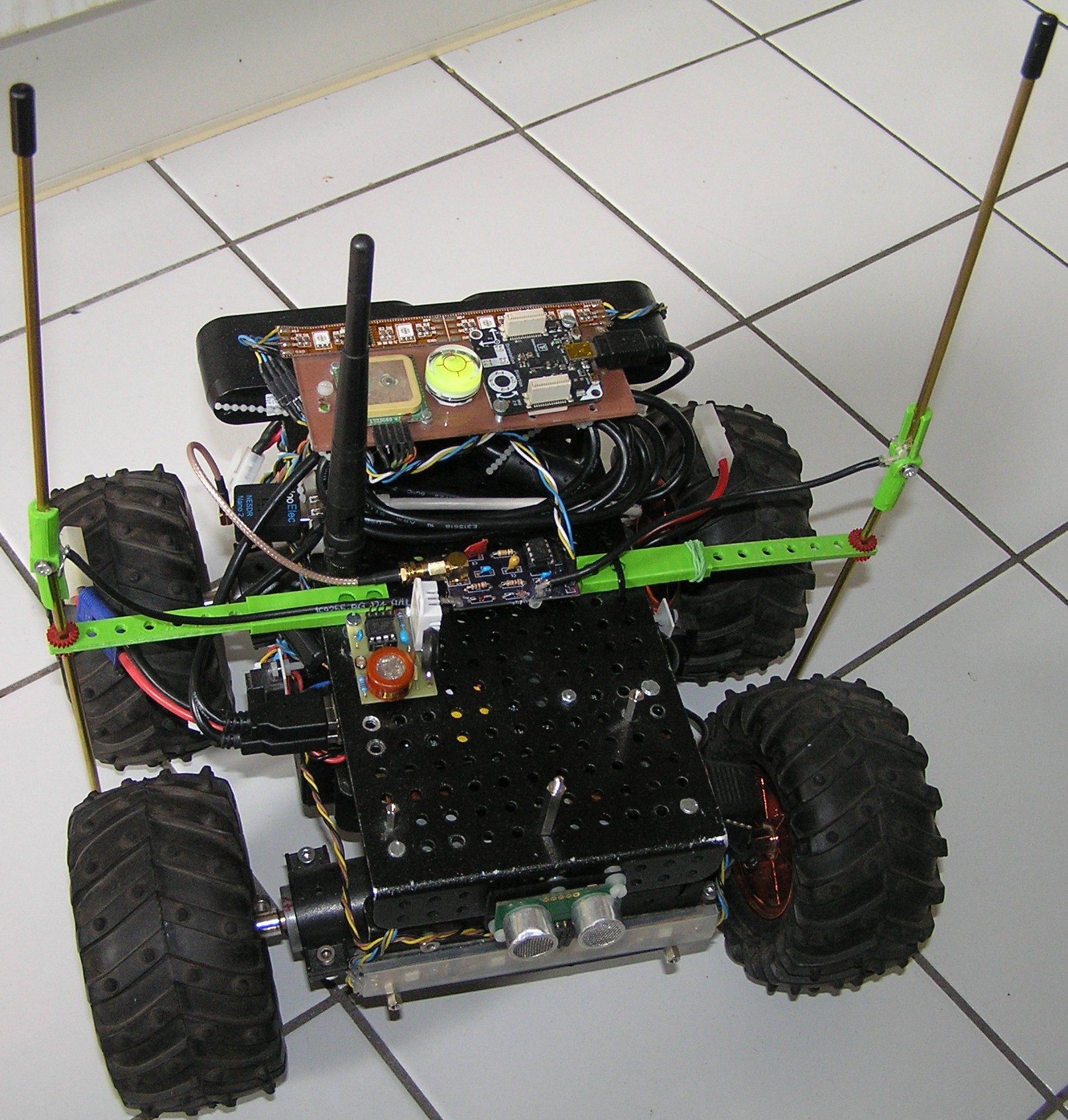
The diodes are driven with a PWM from an AVR Attiny. Using a capacitor the amplitude of the PWM is shifted to -2,5/+2.5V. The HF is connected to an rtl sdr, decoding is done with GNU Radio. The whole setup looks like this:
The transmitter has to be FM, the closest thing to that in my inventory was an RFM12 (433MHz), which does Frequency Shift Keying (FSK). I programmed the RFM12 to send a few zeroes so I can easily identify the signal. The result looks like this when the left antenna is closer:
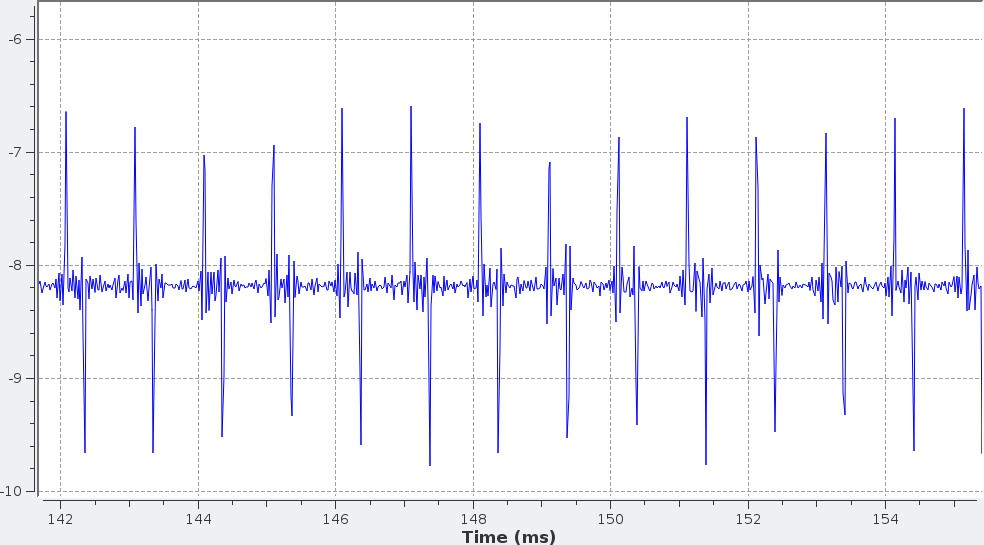
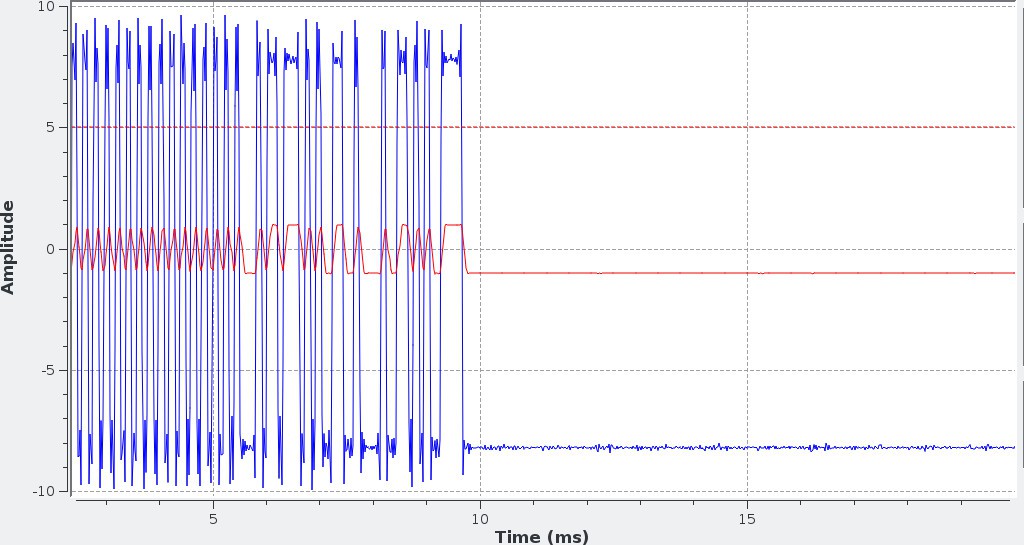
As one can see I use a PWM with a ratio of 30% : 70% to distinguish between both phases. When the right antenna is closer the spikes are inverted. When both antennas are equidistant distance from the transmitter the signal is not disturbed:
So the setup basically works, the robot can distinguish if the transmitter is closer to the left, closer to the right or equidistant to both antennas. But there are still a lot of problems, mostly from reflections which do make the robot drive to the wrong direction...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.