I wanted to get my Wild Thumper to clean the floor so I attached a microfoam brush to the front:

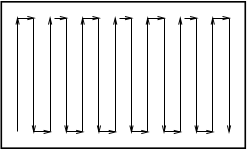
So the robot should clean the floor by fully covering a given area with simple back-and-forth boustrophedic motions. Boustrophedon means "the way of the ox", like a plow that is dragged by an ox in the field:
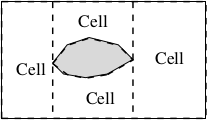
The area to clean has to be broken down into cells where each cell can be covered by these simple motions. Applications include cleaning and mowing. One algorithm for this is the Boustrophedon Cellular Decomposition which is explained in the linked paper:
To execute this algorithm with a robot I have created a ROS node which resembles the output of the Boustrophedon Cellular Decomposition on a given global costmap and executes the path coverage using the ROS navigation stack:

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.