 dannyvandenheuvel
dannyvandenheuvelI did some more improvements on the base.
Added a magnetic angle sensor and a fan for cooling (hint from Olaf, thanks!)
Changed some little things on the structure.


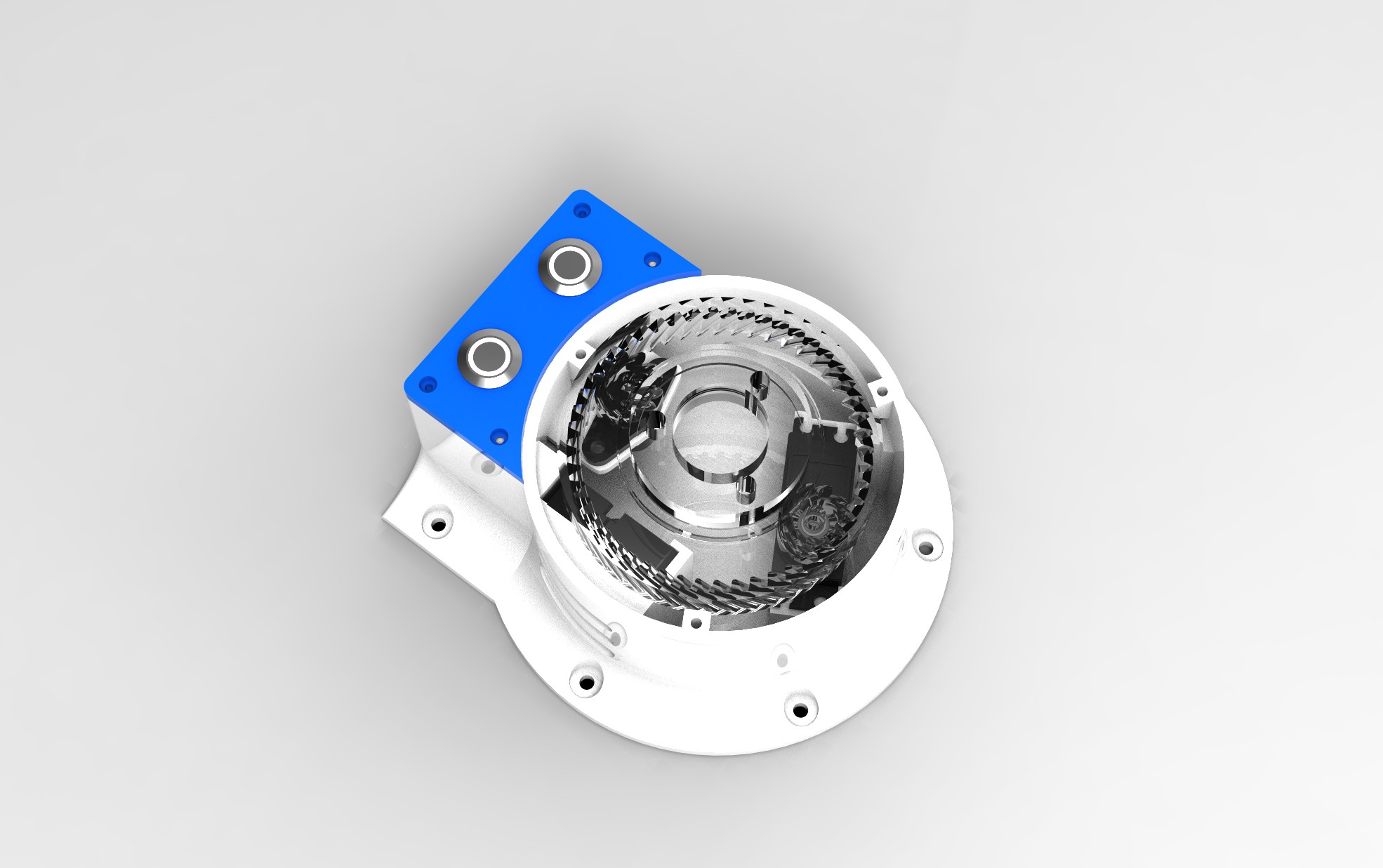
Inner structure of the base, if you watch carefully you can see servo,magnetic angle encoder and the fan inside :-)
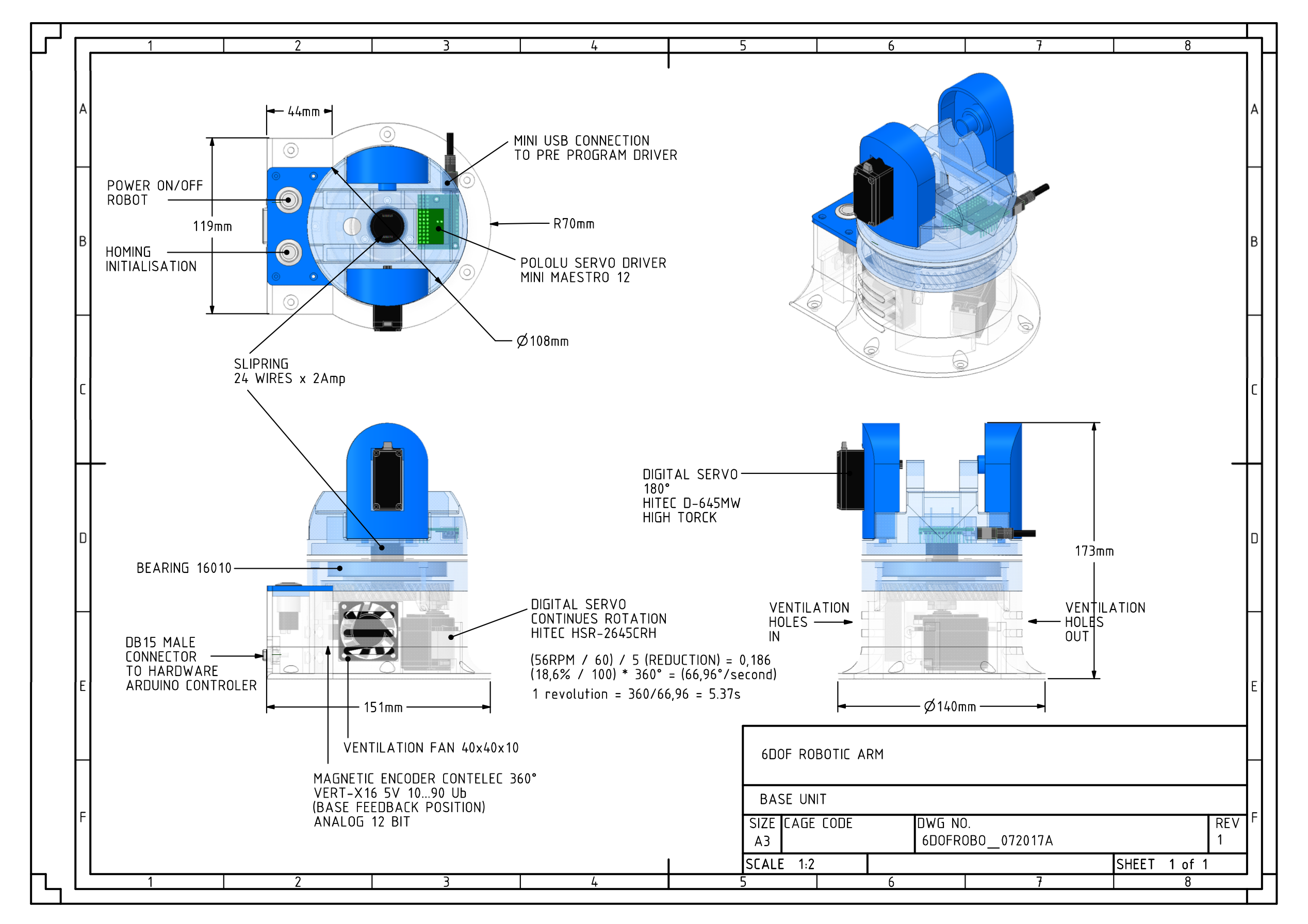
This is the final drawing of the base (I hope so), just have to print it and test before it goes online.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
That ventilator is really a MUST for the real Thor project so the complete project would benefit from it.
The Thor base may not fit a 40x40 mm ventilator but a 30x30 mm does work but is more noise than the 40x40.
If you design something in the future, can you make sure that when it gets relative big in size that you use rounded corners? I think I never have issues with warping ABS plastic when I have circular objects. The issue always start at the corner.
Are you sure? yes | no
That's the benefit of servo motors, the driver is inside the motor so pololu won't be producing heat!, I only have to cool down the motors. I don't use any stepper motor in this robot. And can't go with air in the upper room, it's completly sealed by the slipring. Thanks for the comment anyway, like the feedback, makes me think twice :-)
Are you sure? yes | no
The 40x40 mm fan is a good choice. used a 30x30 mm and they are a lot more noisy. When I drilled the opening.
This Thor base is still a Thor base? Because I may reprint this one instead which has a more professional looking fan opening :-) The one I drilled a hole in afterwards is not that nice.
Are you sure? yes | no
This is almost a thor base but smaller, 3/4 scaled from the original thor+, if you will have it for thor+ I will modify one for you :-)
Are you sure? yes | no
You may not need those "out" ventilation holes if the mid section is open. That way it forces the air upwards cooling components higher too. But your slip ring may block that inner opening. You have this polu servo driver in the upper part that may also need cooling I assume.
Maybe venting holes that forces the air to the upper part in the base and outwards so the air blows onto the side stepper motor?
Are you sure? yes | no