 Alex Karadimos
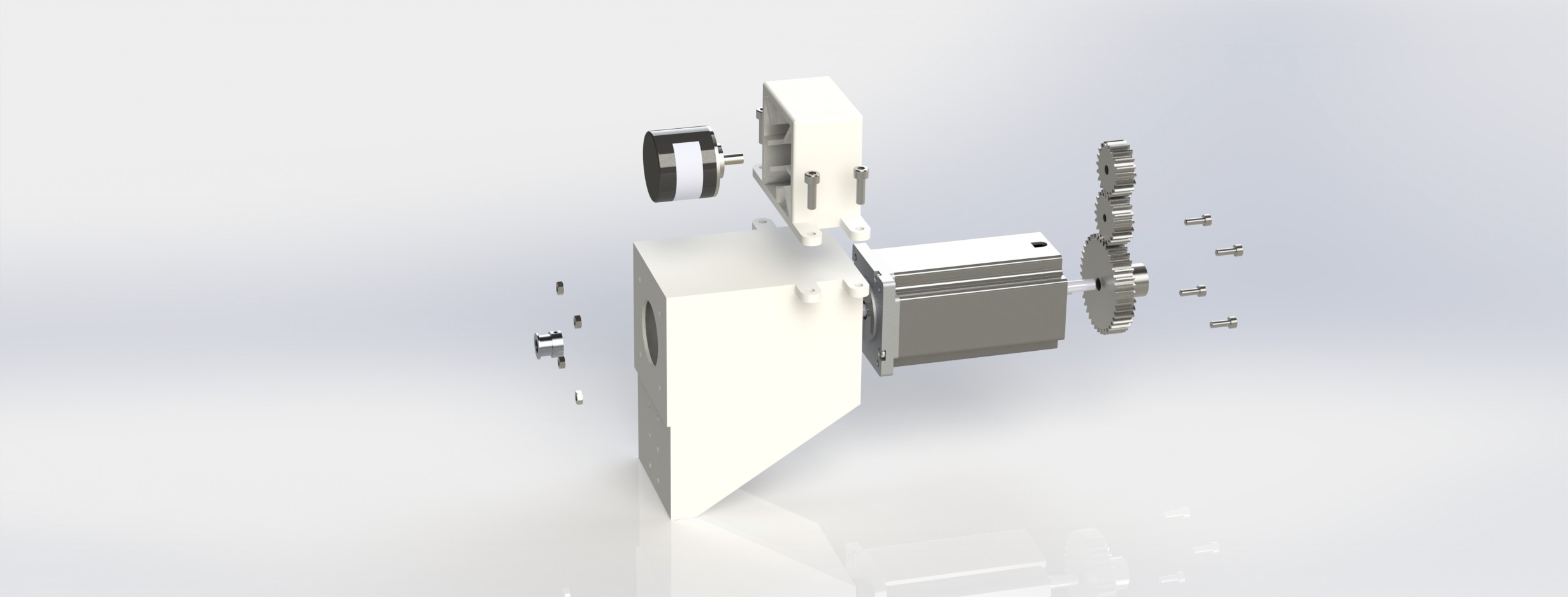
Alex KaradimosIn Surgery Robotics, the most crucial thing is precision of about 0.5 micrometers and also repeatability. Stepper motors are very precise motors but in order to make sure that these always work as programmed and measure each step correctly we also need an encoder. For each stepper motor (double shaft) we use an optical encoder which will measure the shaft's rotation, from the back side of the motor, via a set of gears.
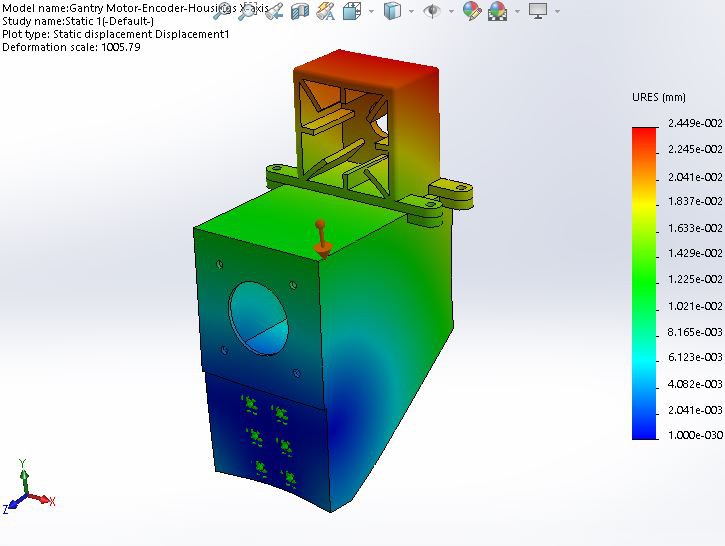
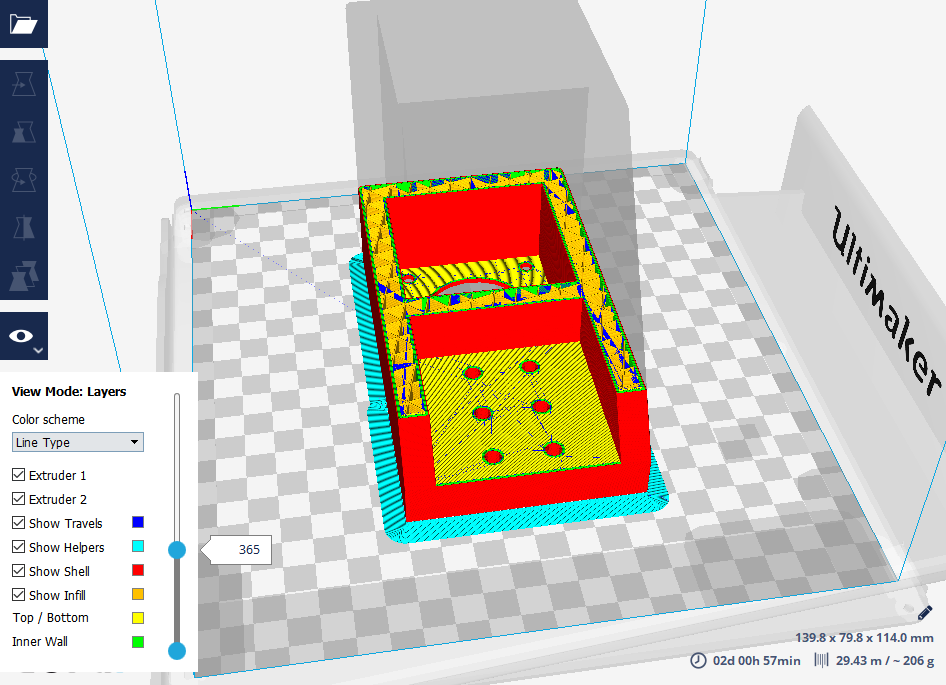
To make that possible we need a component to house the motor, the encoder and the gears. The housing will be 3D printed.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.