 Radu Motisan
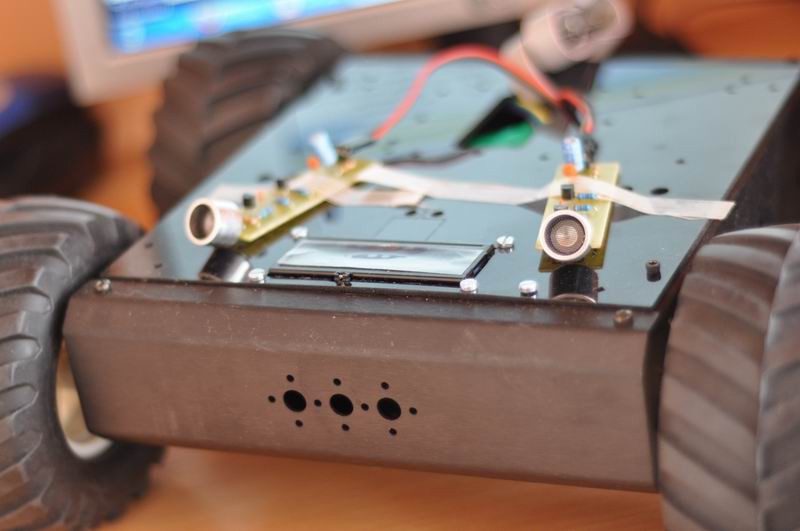
Radu MotisanApril 09, 2013: Using the ultrasonic sensors differential readings (with sensors placed in front, at angles of aprox. 15 degrees of the longitudinal axis), I got some excellent results: the robot is able to follow me, and keep track of my speed, and orientation:
The algorithm compares the readings from the two sensors and decides whether to turn left (if left sensor return higher readings), right or to move forward (if the output of the two sensors is similar).
There are some remaining issues:
- if the robot approaches a wall, and the beacon signal is coming from the back, it will reflect in the wall and confuse the robot
- no detection capabilities for signal coming from any other direction, other than the front
To solve these issues, three more ultrasonic receiver boards are needed, namely one for back, and one for each of the sides. Also the movement is a bit shaky, and this can also be improved by changes in the robot's software code. More to follow soon.
 I built some nice PCBs for the ultrasonic sensors, and provided more details on Detecting an ultrasonic beacon, here.
I built some nice PCBs for the ultrasonic sensors, and provided more details on Detecting an ultrasonic beacon, here.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.