There are five digits in the human hand each of which are extremely important in creating a hand that is extremely dexterous and capable of maneuvering a range of different objects. The index finger and the thumb are independently driven with teh thumb being given 2 DOF, where one degree allows for Abduction/Adduction (rotation of the thumb joint) and) and Flexion/Extension of the thumb joint. A 2 DOF thumb encompasses the movement required for nearly all methods of grasping giving UAProstheticHand the ability to hold nearly any object that it is presented with.
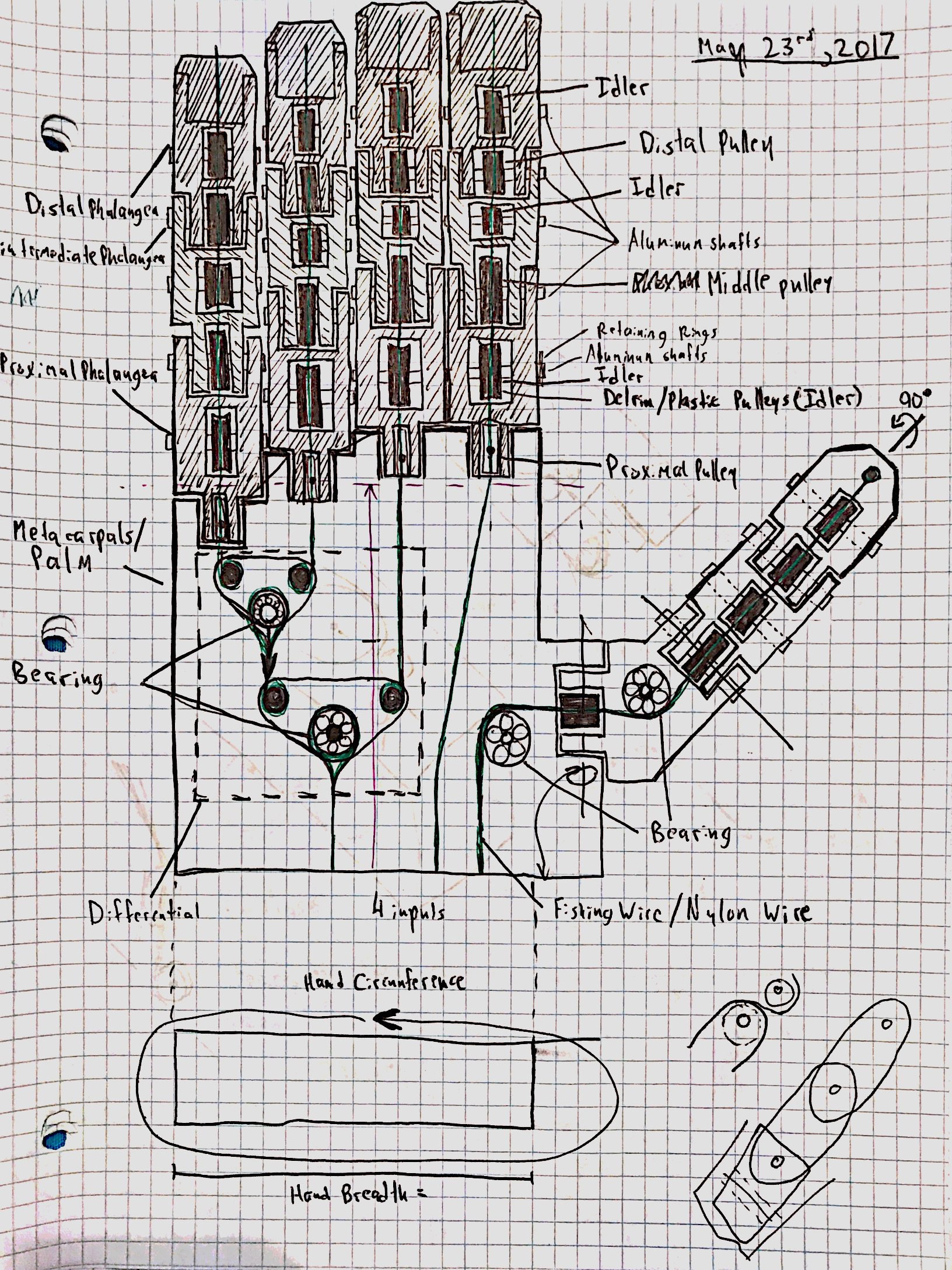
The middle finger, ring finger, and pinky serve a less crucial purpose for the majority of day to day task and tend to move in in sync largely conforming around objects that are grasped. In order to reduce the mental loading associated with these muscles UAProstheticHand implements a double differential to control these three fingers. This reduces the degrees of freedom (DOF)from 3 to 1 thereby simplifying the control of UAProstheticHand, reducing the weight, and the cost. The double differential allows the three fingers to be actuated together and allows the three fingers to conform around any objects it grasps using an active close passive (elastic) open mechanism. a more simplified diagram for the double differential is shown in the second photo

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.