 slantconcepts
slantconceptsWhy Robotics Matters
Biology, Physics, Mathematics, Psychology, Design, Art, all of these are components of robotics. No other discipline is so multidisciplinary. Robotics provides an outlet for every student, the builders, the engineers, the creatives. They all can get something from robotics.
Besides that, robotics is just plain cool. Nothing else makes kids' eyes light up like a robot. That is why were are working to create these robotic STEM kits to get kids excited about technology and its possibilities.
The LittleArm Big
Bigger is Better.
At Slant we have spent the last year or so working with robot arms for education. The best known of these is the LittleArm. But the LittleArm is small. As kids move forward with robotics the LittleArm does not have the capabilities to keep kids interested into high school and university. We had to create something larger with more potential for practical applications.

So we created the LittleArm Big. A Robot that is designed for upper-level education but has the potential to be used in practical settings, such as the Maker's workbench or even in the home prepping toast in the morning.
The LittleArm Big is a large-sized Arduino robot arm. It has been designed to be a desktop robot arm that is fun and even practical but also reliable as an educational tool in higher level robotics education.
Mechanical Design
The Big, is beefy. There is really no other way to describe it. We have designed the arm to take some abuse.
- Total Parts - Less Than 50 (3D Printed Parts - 12 )
- DOF - 5 + Gripper
- Reach - 11.5 Inch
- Payload Capacity - 0.25 Lbs
- Overall Weight - 1 Lbs
- Assembly Time < 2 hours
High Strength Metal Gear Servos
We do not try and skimp on performance. All the servo motors in the arm are metal-geared. This allows for maximum strength, performance, and resilience. The servos give the arm a maximum lifting capacity of 0.25 pounds, fully extended.

3D Printed Lightweight Rugged Design
3D printing allows the creation of strong, but incredibly lightweight components. Molding can't match it. A 3D printer is also one of the most common maker tools, making the Big highly accessible.
At Slant we have been mass producing components with 3D printers for some time. When we designed the Big, we designed it specifically for 3D printers from the very beginning. We are not just creating robots we are creating the processes and procedures to use 3D printing in commercial manufacturing.
Software
The Software of the LittleArm BIG is designed to be very easy to use so that beginners and kids as young as 6 years old can get started with it.
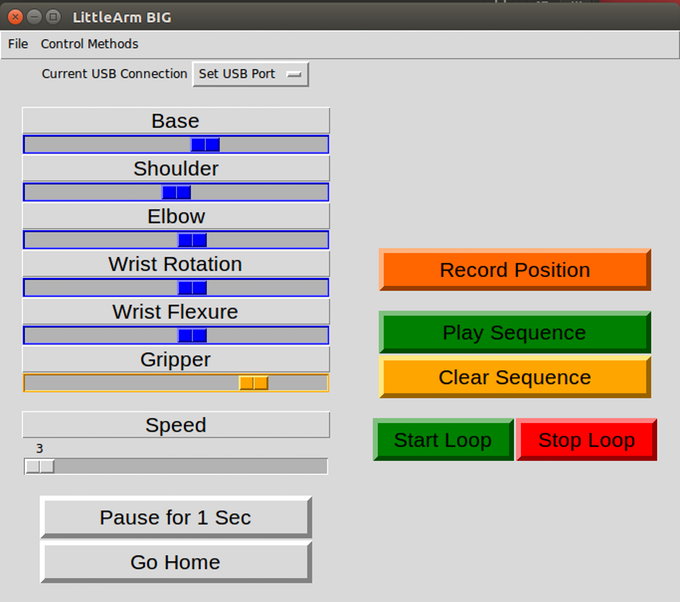
Desktop Application
Using the GUI, users can move the joints of the Big simply by using the sliders in the GUI. Waypoints can then be recorded to generate an entire sequence that can be played back.
Android App
The Android application for the Big is an simplified version of the desktop software. It connects to a bluetooth-enabled LittleArm Big and allows control and recording of motion sequences.
Speech
The Big does have speech capabilities. There are several dedicated files which correspond to commands such as "Up," "down," "rotate base," But there are also files which can contain user generated sequences. These files can then be edited by the user and triggered with keywords such as "Task One."
The Speech system is very accurate since it is powered by Google's cloud speech recognition.
We will be expanding on this in the future to make it more adaptable but for now we consider it a "maker-level" feature.
Electronics
The LittleArm Big is powered by the Arduino (specifically an Arduino Nano). This is a great advantage because it offers huge possibilities to the Open-Source community.
The Arduino platform also allows programming of the arm with tools such as BlocklyDuino, a graphical programming language similar to scratch.
We have also implemented the electronics so that they offer maximum expandability. The primary control board allows for multiple analog inputs and can accommodate more servos for specialty end effectors.

6 Analog/Digital Inputs
The Big is natively an open-loop system. Yes the servos have some internal feedback, but they can't really sense the world. There are several additional ports available which can provide trigger data or monitoring of some of the joints.
