 Nelson Phillips
Nelson PhillipsKnowing that I was behind and that soft actuators are difficult to get right I knew I was highly unlikely to finish to the level need to meet the Robotics Module Challenge. So this being a bit disappointing the first iteration through the first pour came with the first problems that need fixing. However, there is a couple of successful aspect that should not be ignored and they are the method of fixing the actuator to the exoskeleton worked well. Generally the mold also worked well the only adjustments will be to fix the mechanical properties of the actuator not the concept of a flexible modular mold creation system.

Among this detritus of disaster is a couple of solutions. To how the actuator interacts with the exoskeleton and generally how the actuator exits the mold and assembles.
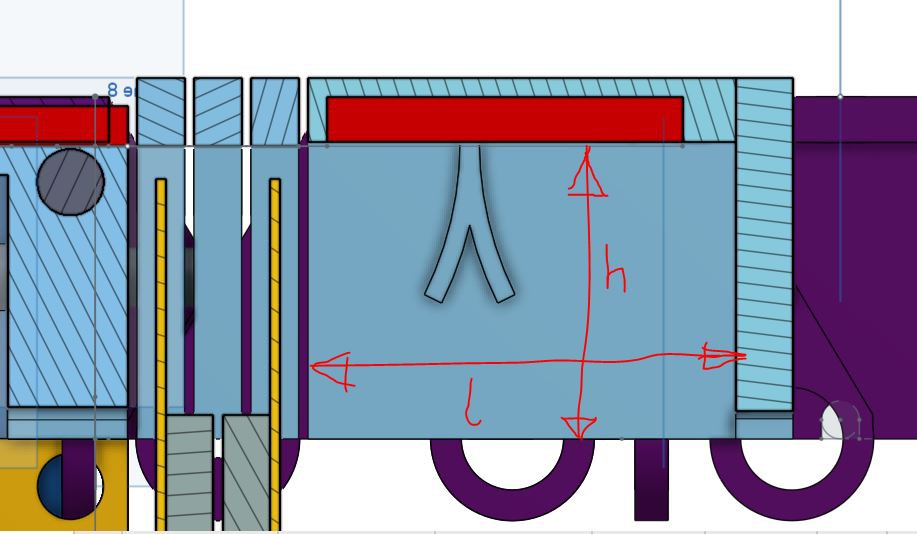
- The interaction between the exoskeleton and the actuator requires the axis and the neutral axis having similar centres. If they do not then there is added stress in the actuator and the performance is significantly reduce. Above the sections have had the top few millimeters removed so the actuator sits further up into the exoskeleton. An adjustment to the between sections of the mold will have the inner roof lowered (h) and for other reasons the length (l) will also be reduced to counter the 3D print overflow.
- The tube attachment holes need realigning for the previous adjustments but, also the size of the holes could be a little bigger just for ease of assembly.
Without these adjustment a working actuator could be achieved however the aim was to have a working model by the end of the robotics challege as this isn't going to happen the adjustment to the mold will be made first then a better model should be achieved anyway. Also the molds will not be released until they produce a better outcome. In the mean time the drawing provided can be used to reproduce for the actuators and the released exoskeleton CAD files.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.