 Nelson Phillips
Nelson PhillipsAs this projects original motivation, apart from an interesting soft robotic project, was to participate in the HaD Prize. As it didn't get to a stage of completion I was happy with a shift in direction is needed to further participation in the prize. So to fulfill the surprisingly narrow criteria of Human - Computer interfacing this shift would need to go back to the principles of soft robotic and its origins of social robotics to find the hook needed to continue. I must note that this is not necessarily a bad thing as the reasons I found soft robotics interesting is the interesting human and computer interactions. Essentially this is placing greater emphasis on how the soft robotic system conveys information rather than the previous emphasis of filtering the noisy environment.
What this means.
Firstly finishing off the mold design concept. The mold design up until here had the actuators on one side of the mold which meant that the end product could only flex in one direction. This means that it really is not totally flexible and modular process and the sections cast were limited. In reality the each section could be glued together but, that goes against the principle of the concept.
So this is done and
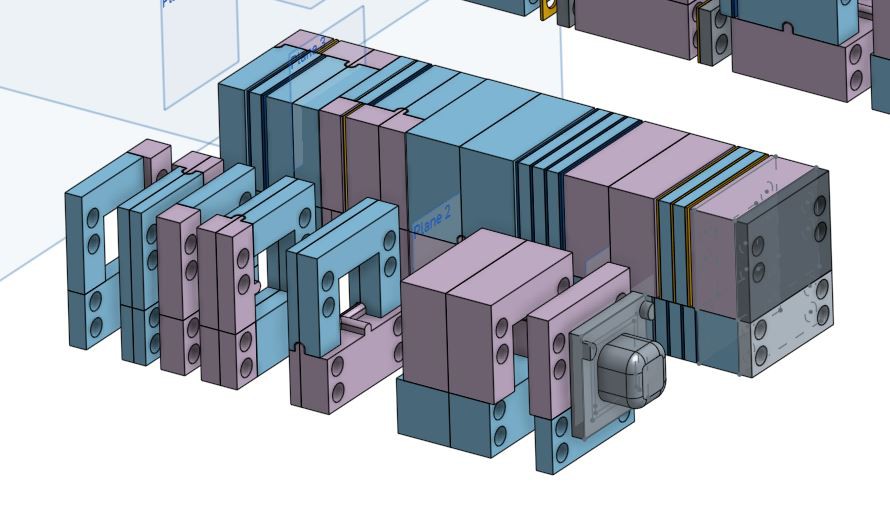
the above picture shows the mold, upside down, with the first part the upside down actuator, the second is typical, the third flexes toward and finally the last away.
The outcome should be a section with an ability to reach in all directions. In theory it could replicate a elephants trunk or a caterpillar. As this project is projecting towards human computer interface then this selves as the interface and requires more than just the mechanical interface of the soft actuator. The nodule at the front is the first step into making this actuator more of a sensor mechanism.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.