 llo
lloGrace à cet après-midi très productif passé à Leroy-Merlin, je sais exactement comme je vais créer les articulations pour qu'elles soient optimales, tant en taille qu'en forme et en poids. Je vais replier une feuille de cuivre, l'arrondir jusqu'à obtenir le creux puis la bosse qui permettront aux tubes de bouger l'un par rapport à l'autre et les relier avec des filaments judicieusement placés.
J'ai d'abord trouvé une articulation sphérique avec une boule en acier, et elle était parfaite. Mais j'ai réalisé que c'était beaucoup trop évolué pour la simple fonction de coulissement à 360 degrés dont j'ai besoin. Trop lourd, trop complexe, trop délicat. J'ai donc continué à chercher et au rayon plomberie j'ai trouvé des rosaces coniques :

Bien qu'elles ne soient pas la solution parfaite dont je rêve, elles m'ont remis sur la piste de la création d'articulations sur mesures, simplement en courbant une feuille de cuivre très fine et en la repliant pour l'épaissir et la renforcer, afin de créer les creux et les bosses des os de mes robots. Je vois maintenant où je vais. :)
Hélas, je n'aurai probablement pas assez de fonds ce mois-ci pour acheter une feuille de cuivre (et les tubes en cuivre très fins qu'il me manque pour les doigts et les orteils). Je verrai à la fin du mois. Cela dit, j'ai tout de même pu finaliser sur le plan théorique la forme de mon robot, et bien mieux que lors de ma première tentative il y a plusieurs années, où j'étais restée coincée au niveau de l'articulation des épaules et des hanches. Le travail sur les avant-bras et les jambes m'aura permis de dépasser cette difficulté : je vais simplement utiliser 4 fils, et 2 moteurs et les combiner pour obtenir le mouvement désiré.
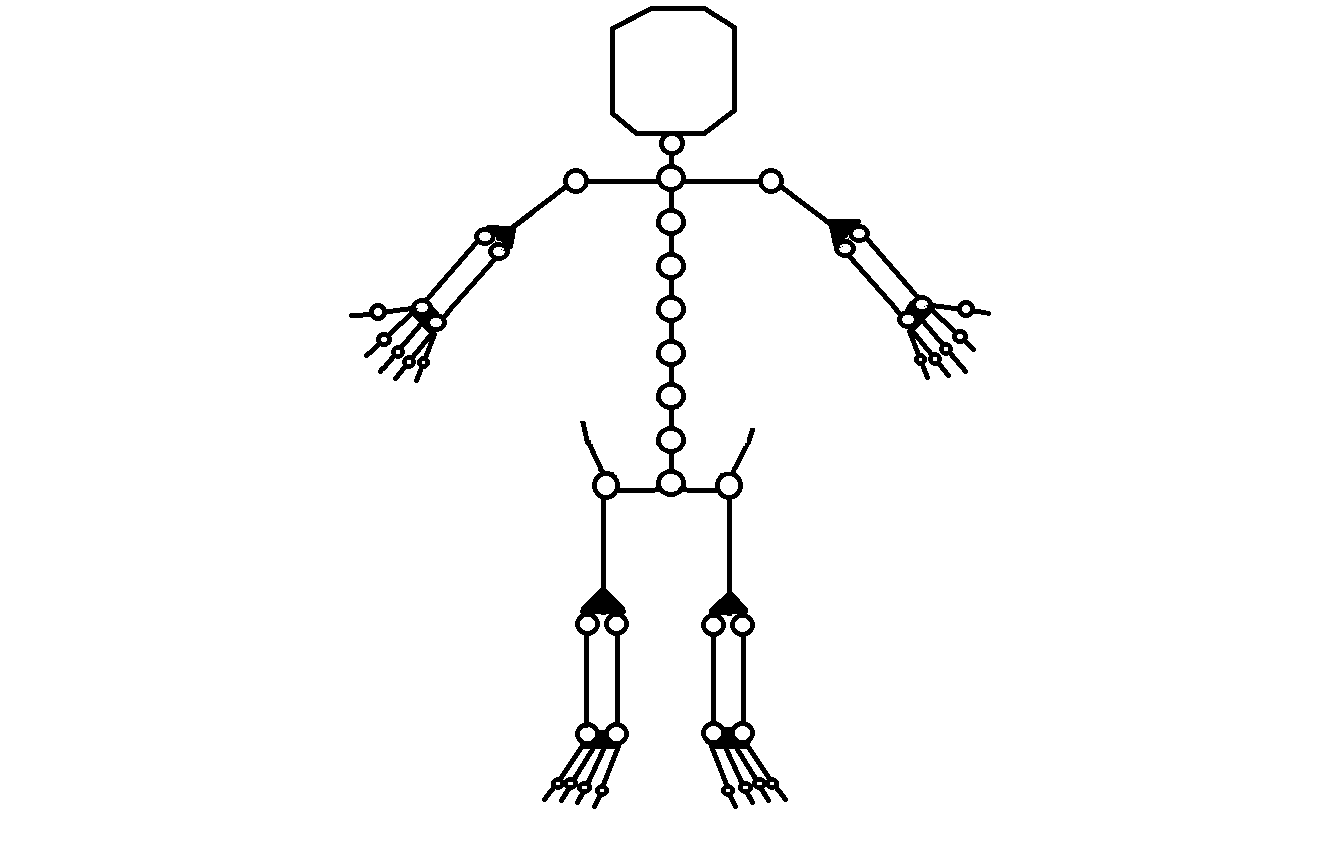
Il ne reste donc plus la moindre zone d'ombre au niveau des articulations, tout est clair dans ma tête. Voici d'ailleurs le plan schématique du robot à ce jour : (on notera le pelvis, qui loin d'être optionnel va permettre de supporter les organes internes du robot : batteries, unité centrale ...). J'en ferai prochainement un plan plus détaillé, quand je devrais le concevoir (avec une feuille de cuivre également, ainsi que les omoplates et les cotes, non visibles, et le crâne bien sûr).
Ça va être un travail d'orfèvre et le résultat sera encore plus magnifique que j'en avais rêvé :)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.