This weekend did not go as planned, there were a bunch of setbacks...
First of all, I'm still waiting on the Z-axis stepper motor, but that should goefully arrive this week.
What should have just a quick test of the firmware and the X- and Y-axis turned into a 6 hour long bughunt. I first tried GRBL, but it turns out that nobody got GRBL running on an Arduino Mega 2560 with a CoreXY configuration. You can choose 2 of those 3 things and have it running in a couple of minutes, but for some reason all 3 is impossible...
After about two hours I gave up with GRBL and instead installed Marlin, which worked on the first try, but seems to have less smooth motor movements. And for the next 2 hours I was trying to figure out why only one of my steppers was turning.
And this was the cause:
 One of my stepper drivers was dead on arrival!
One of my stepper drivers was dead on arrival!
At this point I was ready to throw the electronics against a wall and felt extremely stupid that it took me this long to find the problem, but I wasn't done yet. With both motors now running I realised that they were stuttering and seemed to move too much. After quadruple checking my calculations for the steps/mm settings and everything else I gave up and went over to my girlfriend.
We talked it over and came to the conclusion that my calculations were correct, and she had the idea that the microstepping jumpers were set wrong. I wasn't convinced about this but said "sure, why not, I'm gonna test that tomorrow...".
Turns out she was right.
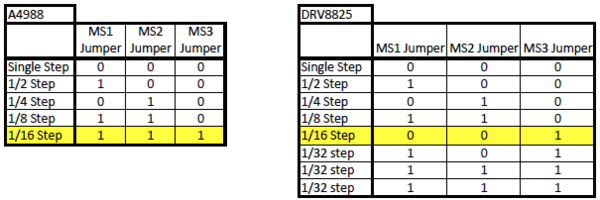 When I looked up the jumpers on a Ramps 1.4 board I found the table on the right, without the "DRV8825" label and assumed this was correct for all stepper drivers. Moral of this lection? Don't assume stuff and double check your sources...
When I looked up the jumpers on a Ramps 1.4 board I found the table on the right, without the "DRV8825" label and assumed this was correct for all stepper drivers. Moral of this lection? Don't assume stuff and double check your sources...
Lastly I couldn't make the baseplate to mount everything to because of all the lost time. My local makerspace is only open on wednesday and saturday, so I hope I can go there today or next saturday...
Now to the good news:
All the parts that I had to reprint are printed, and the quick swap system works fine and seems to be very riggid!

The "universal toolholder" with a pen.
And the part that I'm most proud of so far:
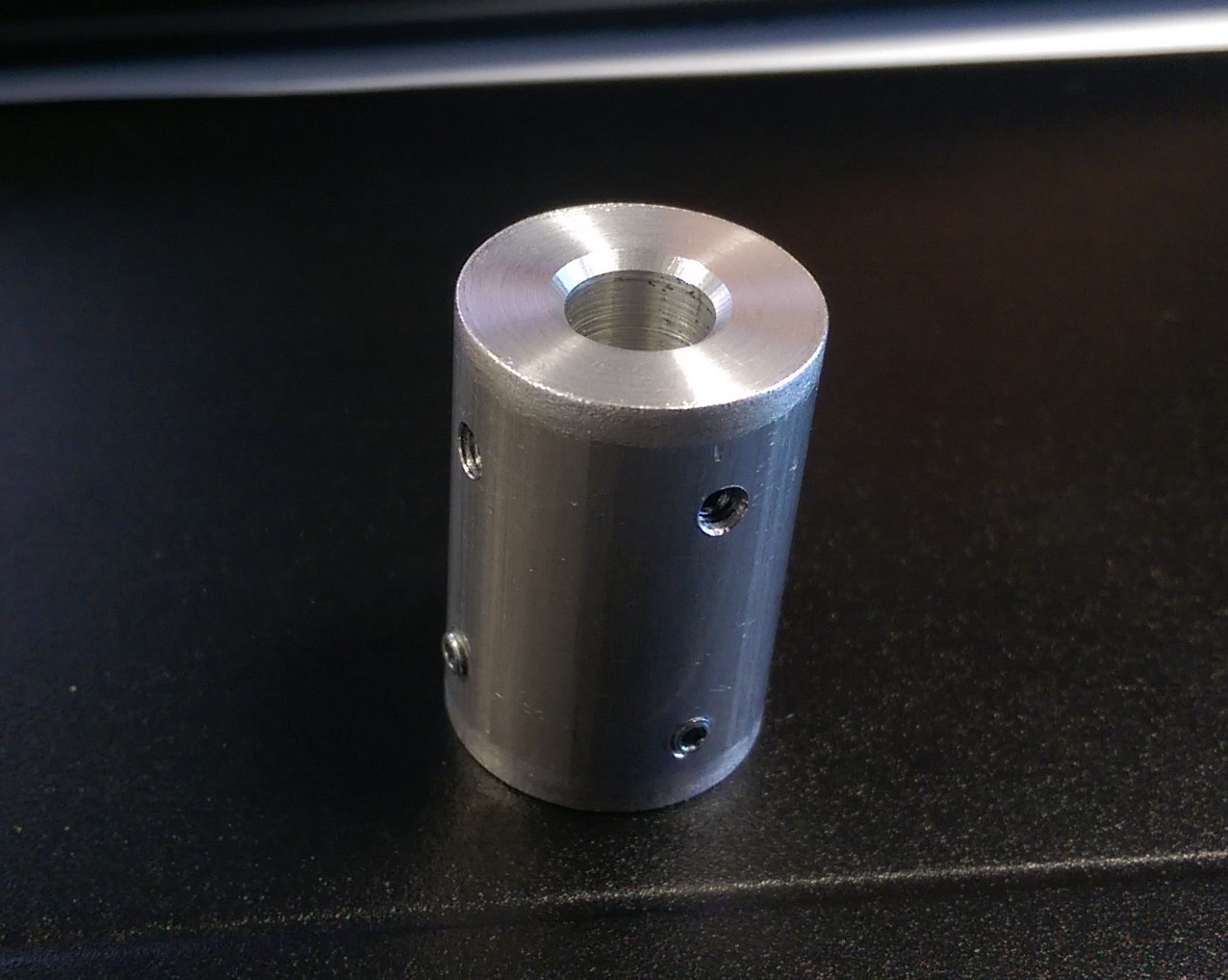
I couldn't find a solid 5mm to 8mm coupler, so I made one myself :D
The last time I worked on a lathe was about 8 years ago, so I think it turned out pretty decent :)
A flexible coupler would have been too weak for my design, but this should do the trick.
That's it for this update, if anyone knows how to get GRBL working with a Arduino Mega + Ramps + CoreXY, or how to get smoother movement out of Marlin, please let me know.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.