 Jarrett
JarrettI hinted in the previous log that there were some changes in the pipeline.
My CAD drawings use thinner acrylic than the stuff I actually ended up using. This, in addition to deficiencies of the design, led to some issues that require another revision.
Here is the current design:
Due to the acrylic sizing, the bearing blocks on the right have a fair amount of slop. This isn't helped by cheap bearings, either. For the initial startup, the driven shaft goes all the way to the top set of bearing blocks, preventing the cantilever effect from causing issues.
As soon as that was sliced to hold the PCB, however, the cantilevering got much worse.
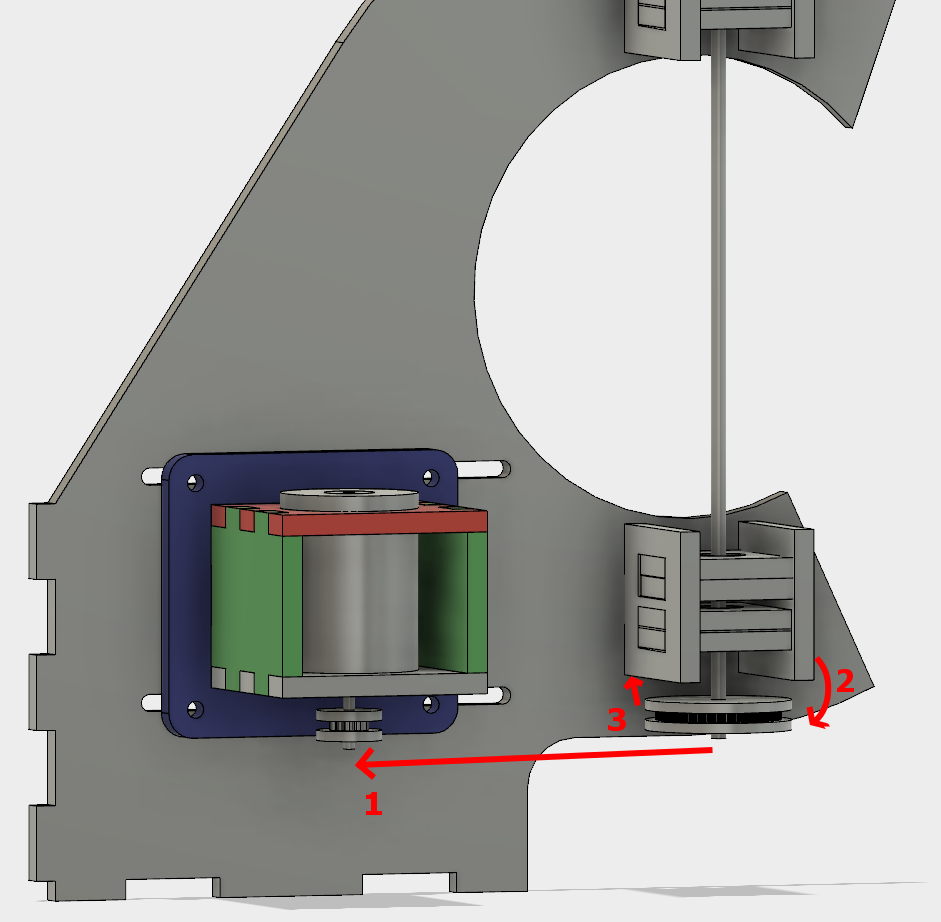
All three pieces of acrylic that make up each pulley are thicker, leading to all tolerances being a little tighter than how it looks in the design. When the pulley is on and tensioned, the forces are pulling the driven shaft(1). That's causing the shaft to cantilever towards the motor(2). When that happens, the sidewalls of the pulley start rubbing the bearing block(3), in addition to causing a ton of vibrating as the PCB is off-centre.
So that means that as soon as my PCB was actually attached, the system was hard to start, unstable when it did, and then high enough friction that my motor burned out.
So it's back to the drawing board, for part of it.
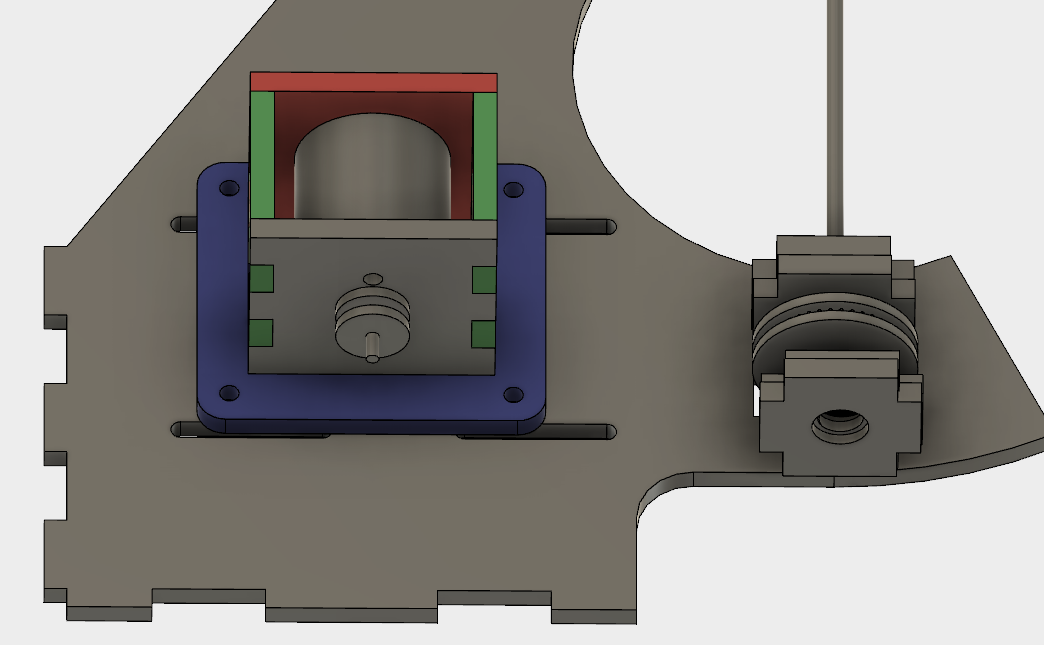
In this rearrangement that took all of 30 seconds, it should be easy to see what changes need to be made. The motor carriage will be shifted up a little, to allow the pulley to rest in between two bearing blocks. This should completely eliminate any cantilevering, unless the shaft itself is bending(which would be a Bad Thing).
Additionally, instead of trying to sandwich bearings with acrylic of the wrong size, I'll rest them in an open hole, held in by shaft collars at the appropriate places. That'll make more sense when I clean up the design.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.