 Christoph Tack
Christoph TackBlock diagram
The original Digistump Wedge has been replaced by an Adafruit Trinket M0 because the USB-connection with the Digistump didn't work reliably.
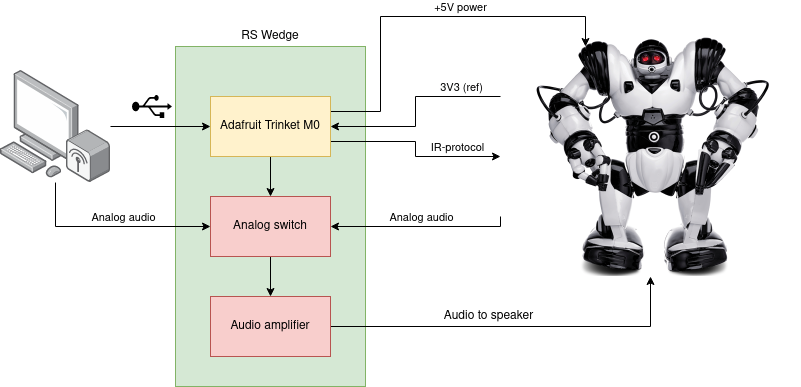
The RS Wedge has two functions:
- Converting commands from the PC to the IR-protocol that the Robosapien understands.
- Control an analog switch to select the Robosapien's speaker output between the PC-audio or the Robosapien internal audio.
Electrical details
Microcontroller
To reduce the development time, a development has been chosen. The Digistump clone has been selected in the end. It has mounting holes, is small and contains a USB-connector.
Audio output
To be able to use the internal sound of the Robosapien as well as audio from the PC on the Robosapien's speaker, an analog switch is needed.
The 74HC4053 will be used. It's cheap and easily available. Its three internal channels are connected in parallel. In this application it doesn't matter much, but it decreases the series resistance of the multiplexer.
The audio from the laptop is too weak to connect directly to the Robosapien's speaker, so we'll use an audio amplifier. The PAM8403 is available on a PCB with the necessary peripheral circuitry. These modules only cost a few cents. The audio amplifier is connected at the output of the multiplexer.
The audio output of the Robosapien can be taken from C13A. This output is connected to a 10/2K2 voltage divider, which is connected to the analog multiplexer. Decreasing the Robosapien to 1/6th of the original level is needed to avoid oversteering the amplifier.
Finally the Digistump controls the state of the analog multiplexer, choosing between PC audio and Robosapien audio for the Robosapien speaker.
Wiring to Robosapien main board

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.