 lukasz.iwaszkiewicz
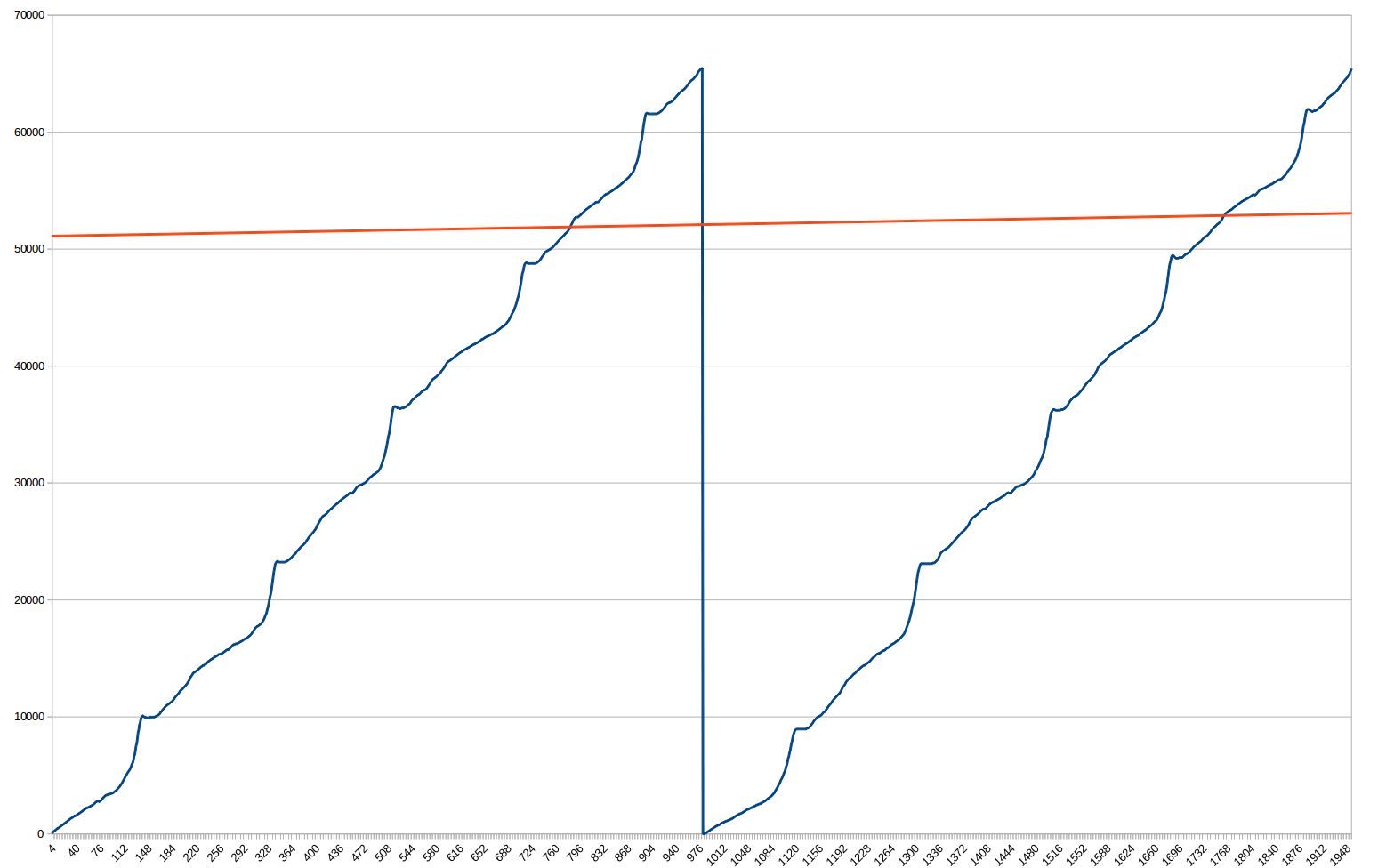
lukasz.iwaszkiewiczThe device uses a micro stepper motor which has enough torque to move lightweight needle. Although the motor has only 20 steps, experiments with extensive micro-stepping gave satisfactory results.
0%
0%
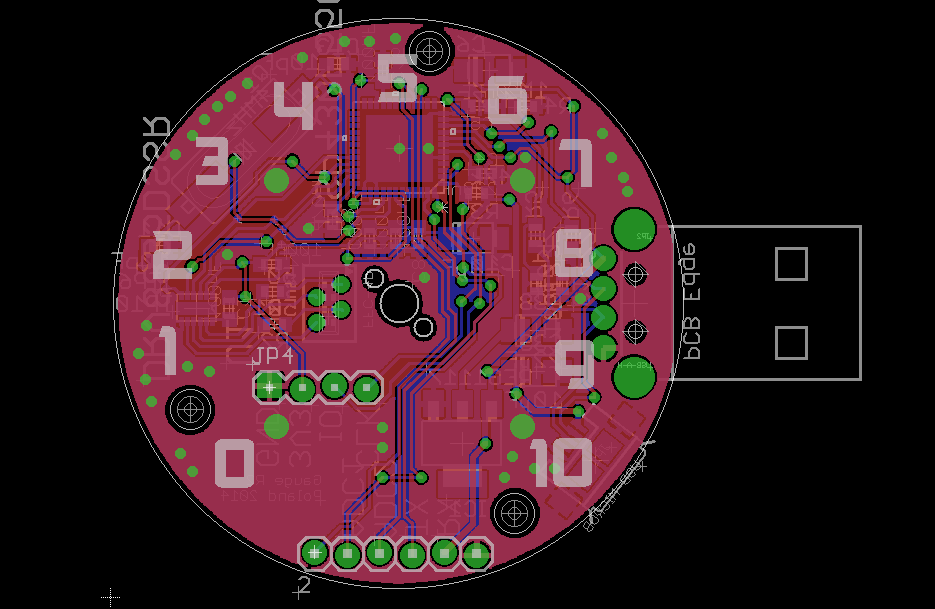
CPU Gauge
An analog gauge with USB, serial and analog interface.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






 Stephen Holdaway
Stephen Holdaway
 Andy Geppert
Andy Geppert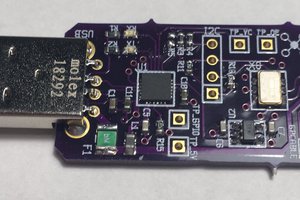
 Carbon
Carbon
 ajlitt
ajlitt
Was there any recent update and a place to puchase a completed project?