 deʃhipu
deʃhipuAfter looking at the PWM library for Vocore (http://vonger.cn/?topic=pwm-is-running-at-gpios) and trying to actually solder more than 2 wires to its tiny 1.27mm headers, I decided that I don't want to drive those servos directly from Vocore. I need a servo controller. A 3.3V Arduino Pro Mini clone will do quite well for that, with a very simple sketch for setting the servo positions by TTL (https://bitbucket.org/thesheep/pkubik/src/tip/controller/).
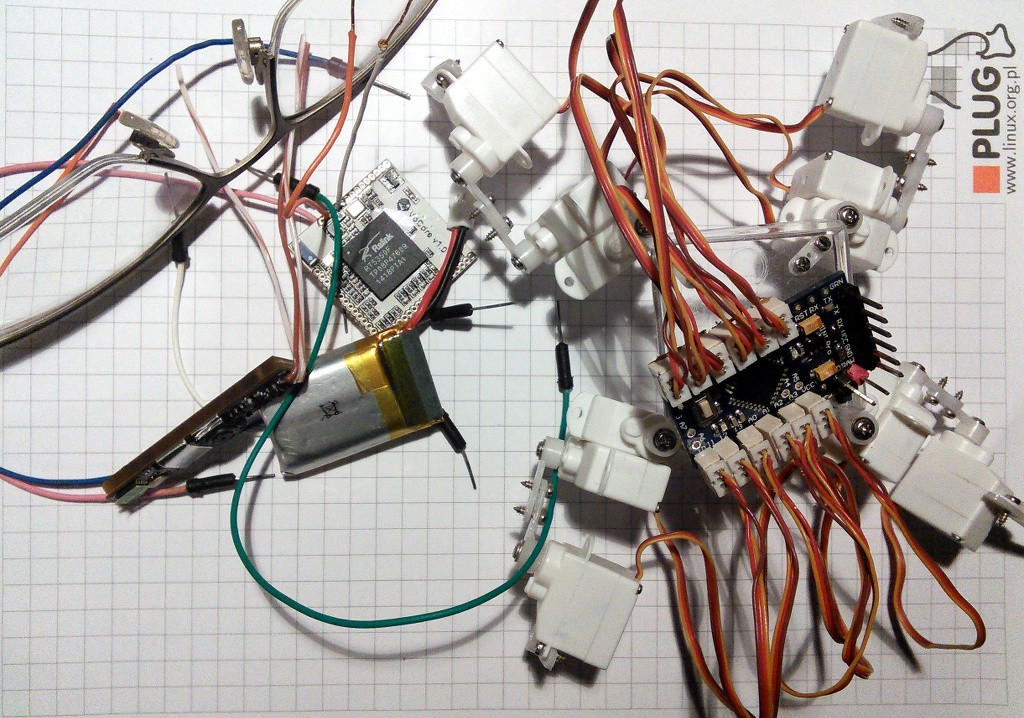 This way I can test the mechanical part of the robot already, by talking to it over USB2TTL from the computer, and then add Vocore and use one of its two UARTs for the same thing. Writing to a tty file should be easier than a PWM driver.
This way I can test the mechanical part of the robot already, by talking to it over USB2TTL from the computer, and then add Vocore and use one of its two UARTs for the same thing. Writing to a tty file should be easier than a PWM driver.
One problem now, though. Arduino's Servo.h library worked perfectly on the 5V Pro Minis that I used before, but it seems to have some problems on the 3.3V one. Either the library is sensitive to the CPU speed change, or the board is simply not fast enough to drive all the 12 servos. Or I simply have some silly mistake in there.
Update: Seems like just halving the pulse width does the trick.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.