 OpenBionics
OpenBionicsOverview
The first set of experiments focuses on validating the efficiency of the proposed selectively lockable differential mechanism to implement different postures and gestures, using only one motor. The second set of experiments focuses on grasping a wide range of everyday life objects, to execute daily living activities.
Force Exertion Capability
We conducted an experimental analysis of the force exertion capability of the hand in different grasping postures. In Fig. 1, we present the relationship between the tendon displacement and the forces exerted by different combinations of fingers. As it can be noticed, by blocking different combinations of fingers we are able to maximize the force applied by the fingertips of the free fingers (for precision grasps). PIP joint has a bigger range of motion as it is implemented with 4 mm silicone sheet (to optimize Kapandji test [2]). If we want to use a grasp involving less than five fingers, we can block the subsidiary fingers and maximize the force transmitted from the servo motor to the active fingertips.
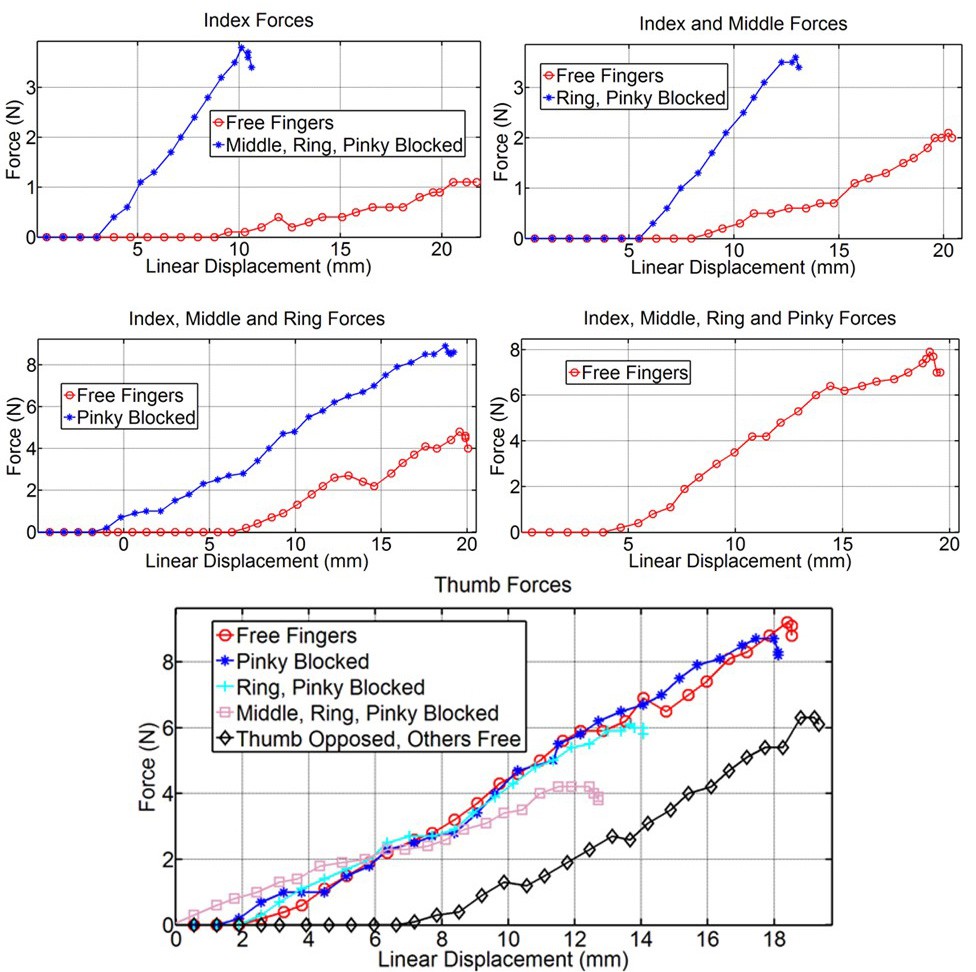
Fig. 1. Relationship between the tendon displacement and finger forces for different grasping postures.
Implementing Different Grasping Postures and Gestures
The first set of experiments focuses on validating the efficacy of the proposed selectively lockable differential mechanism. For doing so, the user presses the different buttons locking different combinations of fingers. Such a functionality is not only important for grasping (where the user is able to choose the preferred grasping strategy / posture), but also for: 1) implementing specific gestures (e.g., making the peace sign or showing a number), 2) reaching an object located at a narrow space (task that may require less than five fingers), or 3) execute non-prehensile manipulation tasks (e.g., press a button or move a slider on a console). In Figs. 2 and 3 different postures are depicted. The motion of each locked finger is constrained by the corresponding button of the differential mechanism.

Fig. 2. Four different postures are depicted. All fingers except one are closing. The locked finger can be used to: 1) press buttons, 2) to reach something in narrow spaces, 3) to implement specific gestures or 4) to execute non-prehensile manipulation tasks (e.g., moving a slider).
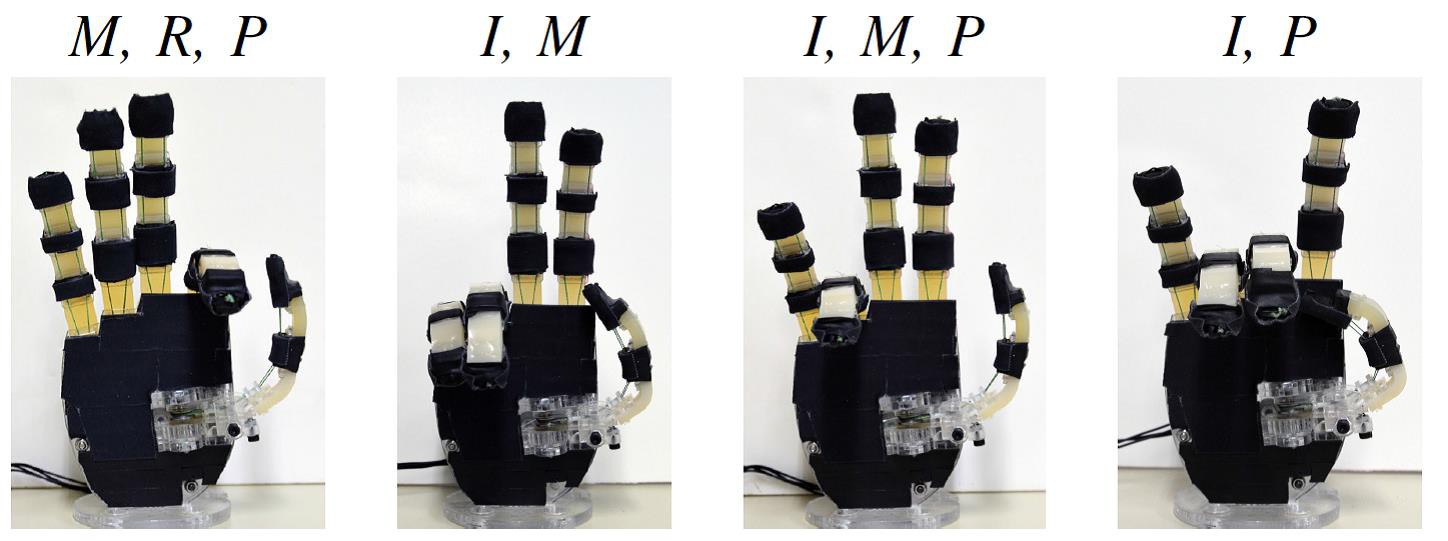
Fig. 3. Four different postures are depicted. The differential mechanism allows for different grasping postures and hand gestures to be achieved. With the letters I, M, R and P we denote that motion of the index, middle, ring and pinky finger respectively, is constrained.
Grasping Everyday Life Objects
The second set of experiments focuses on grasping a wide range of everyday life objects, to execute daily living activities. The objects used are: 1) a mug, 2) a soap, 3) a magazine, 4) a marker, 5) a pair of glasses, 6) a large rectangular box, 7) a glass cleaner spray, 8) a 1.5L bottle of water, 9) a glass of water and 10) a spoon. Regarding the daily living tasks, the hand is used: 1) to serve water from a 1.5L bottle to a glass, 2) to stir the water inside the glass with a spoon and 3) to position a series of tools to their cases and put them inside a rectangular box. Instances of the conducted experiments, can be found in Fig. 4.

Figure 4. Images from the experiments conducted. Five different everyday life objects are grasped in order to execute different tasks: 1) a coffee mug is grasped from the handle in order to drink from it, 2) a marker is grasped in order to write, 3) a pair of sunglasses is picked up and 4) a 1.5L bottle is grasped in order to serve water.
All experiments were recorded and the video can be found (in HD quality), at the following URL: http://www.openbionics.org/videos/
References
[1] Arduino, “Open-source electronics prototyping platform based on microcontroller,” http://www.arduino.cc, Aug. 2015.
[2] I. Kapandji, Physiology of the Joints: Upper Limb: Volume 1. Churchill Livingstone Edinburgh, 1974.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.