 OpenBionics
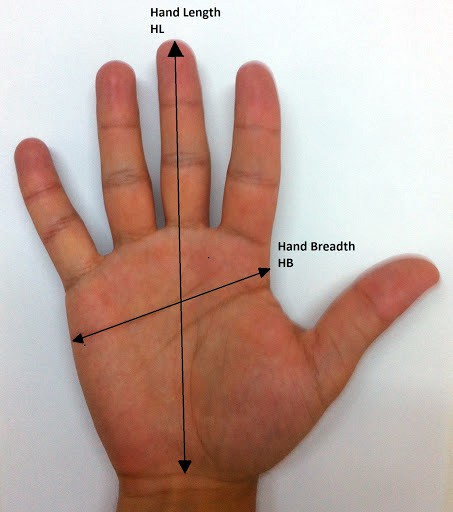
OpenBionicsΤhe use of parametric models derived from human hand anthropometry studies, allows for the development of personalized prostheses. The only parameters that we need in order to derive the finger phalanges lengths and the personalized finger base frames positions and orientations, are the human hand length (HL) and the human hand breadth (HB). More information regarding the hand anthropometry studies and the parametric models can be found in [1] and [2].
The importance of the personalization feature that we provide becomes really significant, considering the fact that customization of commercially available solutions to the body of each individual, typically leads to additional costs of thousands of dollars.

You can use the following link to order your personalized design (.CAD files):
Web Form for Personalized Designs
References
[1] B. Buchholz, T. J. Armstrong, and S. A. Goldstein, “Anthropometric data for describing the kinematics of the human hand,” Ergonomics, vol. 35, no. 3, pp. 261–273, 1992.
[2] M. V. Liarokapis, P. K. Artemiadis, and K. J. Kyriakopoulos, “Quantifying anthropomorphism of robot hands,” in IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2013, pp. 2041–2046.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.